The core of the reactionary program is to make marriage legal again. Without marriage, the higher races cannot reproduce successfully, and reproduction is dysgenic.
Leftist marriage, modern marriage, is gay. Marriage has been gay since 1928.
Obviously reactionaries must reintroduce marriage that is suitable for heterogamous organisms, and we will have to introduce it as a matter of faith and morals before we can introduce it as a matter of law.
The left offers your wife cash and prizes for destroying the family assets, destroying you and destroying your children. The lawyer and the marriage counselor will tell her she is oppressed, and she can get a court order that gives her cash and prizes, raises her status, and will result in her marrying a six foot six billionaire athlete with a dong the size of a salami.
Modern marriage is gay. Everyone who gets married gets gay married. If your wedding vows are symmetric and interchangeable, the same of the man as for the woman, your marriage is gay and you are being gay married.
If your wedding has a master of ceremonies or a priest who acts like he, rather than the groom, is the big important man at the wedding, that he is the alpha male, your wedding is gay, and you are being gay married. (And the master of ceremonies is usually gay, and if he is not gay, he thinks that two males pretending to marry each other with the intention of cruising for nine year old boys to transexualize is smart and fashionable.)
The wedding organizer appoints a gay master of ceremonies whose main job is to define the groom as Homer Simpson, to emasculate him in the eyes of the bride. The minister conducts a gay wedding ceremony that treats the bride and groom as equal and interchangeable, even though experience has demonstrated that wives will not tolerate househusbands, and will invariably leave a domesticated man for a wild man who beats her, rapes her, and rapes and beats her husband’s children.
The worst thing progs did ever was remove “Honor and obey”, “submit and reverence” from the marriage ceremony.
The book of common prayer purged the wife’s vow to honor and obey and purged Paul’s letter to the Ephesians 5:22-33 in 1928. That, not female suffrage, was the worst thing ever, effectively abolishing marriage.
One household necessarily has one captain. If the wife does not promise to honor and obey, to submit and reverence, you are not actually getting married, because you are not actually forming one household, so no point in the ceremony, and, surprise surprise, people stopped holding the ceremony, just as they stopped turning up to Church when the pastor started telling them their husbands were Homer Simpson and if you showed up at Church you were likely homophobic.
We have to restore the marriage ceremony to what it was before first wave feminism.
The marriage ceremony needs to include “honor and obey”, and it needs to once again include Paul’s letter to the Ephesians 5:22-33
- Wives, submit yourselves unto your own husbands, as unto the Lord.
- For the husband is the head of the wife, even as Christ is the head of the church: and he is the saviour of the body.
- Therefore as the church is subject unto Christ, so let the wives be to their own husbands in every thing.
- Husbands, love your wives, even as Christ also loved the church, and gave himself for it;
- That he might sanctify and cleanse it with the washing of water by the word,
- That he might present it to himself a glorious church, not having spot, or wrinkle, or any such thing; but that it should be holy and without blemish.
- So ought men to love their wives as their own bodies. He that loveth his wife loveth himself.
- For no man ever yet hated his own flesh; but nourisheth and cherisheth it, even as the Lord the church:
- For we are members of his body, of his flesh, and of his bones.
- For this cause shall a man leave his father and mother, and shall be joined unto his wife, and they two shall be one flesh.
- This is a great mystery: but I speak concerning Christ and the church.
- Nevertheless let every one of you in particular so love his wife even as himself; and the wife see that she reverence her husband.
And once again include the first epistle of Peter 3:1-7
- Likewise, ye wives, be in subjection to your own husbands; that, if any obey not the word, they also may without the word be won by the conversation of the wives;
- While they behold your chaste conversation coupled with fear.
- Whose adorning let it not be that outward adorning of plaiting the hair, and of wearing of gold, or of putting on of apparel;
- But let it be the hidden man of the heart, in that which is not corruptible, even the ornament of a meek and quiet spirit, which is in the sight of God of great price.
- For after this manner in the old time the holy women also, who trusted in God, adorned themselves, being in subjection unto their own husbands:
- Even as Sara obeyed Abraham, calling him lord: whose daughters ye are, as long as ye do well, and are not afraid with any amazement.
- Likewise, ye husbands, dwell with them according to knowledge, giving honour unto the wife, as unto the weaker vessel, and as being heirs together of the grace of life; that your prayers be not hindered
And we also need to have 1 Corinthians 7:3-5, though the book of common prayer does the same thing in a different way:
- Let the husband render unto the wife due benevolence: and likewise also the wife unto the husband.
- The wife hath not power of her own body, but the husband: and likewise also the husband hath not power of his own body, but the wife.
- Defraud ye not one the other, except it be with consent for a time, that ye may give yourselves to fasting and prayer; and come together again, that Satan tempt you not for your incontinency.
Because without the obligation each to sexually gratify the other, no marriage.
The need to bring marriage back implies a familist movement will look awfully like a religion.
Another important aspect of family is eating together at the same time. Everyone, kids, wife, and guests, holds off from eating until the patriarch says “Amen” then they all eat together. Grace is a ritual that ensures that everyone eats together and that presents the alpha male as backed by the ultimate alpha male, God. Women inherently like their alpha male to be backed by a bigger alpha male, and they are astonishingly comfortable with being assigned to another man by a higher alpha.
So any effective familist movement necessarily has religious rituals that are going to qualify it as a religion. But, like the Masons and progressivism, will probably have to pretend that it is not a religion.
On the other hand, to inculcate the appropriate attitude in women, to make the rituals work, have to tell them “God says do it this way”, which kind of gives the game away.
OK, if God is three and God is one, familism can be a religion and not a religion. If AA can be not a religion, familism can be not a religion.
The Anglican Church died, as the Congregational Church died as a Christian movement long before them, and the Roman Catholic Church is dying in the west. The Pope defends priests having gay sex in a great big pile by saying “consenting adults” and “Global Warming”. Well, if Global Warming is the great moral crisis of our times, why should anyone show up at Church. And they don’t. And if the Church abolishes marriage, why should anyone get married. And they don’t.
The Christian and biblical position is that Christians are kin by adoption and by marriage, that Christians are adoptively the children of God, and the Church is the bride of Christ. So when the pastor abolishes marriage and attacks the authority of the father and the husband, he saws of the branch on which he sits, and it looks to me that every Church dies after it abolishes marriage, though its death takes a bit over a century. The longer ago they abolished marriage and the family, the longer ago they died. Congregationalism was the first to abolish marriage and the family, and the first to go.
We want a synthetic tribe, because we are detribalized. God backing dad comes in mighty handy for making the family a family, particularly for making people eat meals at mealtime. And God comes in mighty handy for promoting ingroup cooperate/cooperate equilibrium by making people kin. These two functions of God seem to be connected in practice.
It is recorded that Christianity spread in the early Roman empire in large part through conversion of women. It is also recorded that marriage had collapsed in the early Roman empire. I suspect these two facts are connected, that Christian marriage may have been a familist movement in the early Roman empire. Similarly we notice that today white female Christian converts to Islam are overwhelming fertile age single women. Roman women converting from dead paganism to live Christianity in the Roman Empire may well have been similar to white Christian women converting to Islam today. They are joining a synthetic tribe where the ultimate alpha male will assign them a husband and ensure that they have a family. While the ultimate alpha male of today’s Christianity is going to give them a “season of singleness”.
If we look at the marriages depicted in the bible, they are all marriages in which the top alpha male assigns the woman. Which is what women want, even if they don’t know they want it.
In Genesis, God, the ultimate alpha male, marries Eve to Adam.
Abraham, a powerful alpha male who successfully made war with kings, marries Rebecca to Isaac. Rebecca is not consulted until afterwards, and Isaac is not consulted at all.
In the book of Ruth, Boaz is a powerful male who is the top alpha in the environment where Ruth is working. Ruth sneaks into Boaz’s bed while he is drunk and sleeping, asks Boaz to marry her, and appears to believe he has authority to perform marriage on the spot. He declines to do so, saying he has to resolve some legalities first but they spend the night together anyway. In the morning he goes off and successfully resolves those legalities, and later assembles witnesses and marries Ruth. Ruth’s mother in law (Ruth is a widow and the adoptive daughter of her mother in law) gives the bride away. Boaz, a powerful alpha male, is the one who presides over this ritual, not a judge or a priest. The elders witness, but they don’t emcee. If Ruth is present at this ritual she does not speak, but before the ritual she had plenty to say to her mother in law and to Boaz in private.
Chicks like the man who is throwing a party, because he is top alpha at the party. As “Setting the Record Straight” tells us, game boils down to three simple things.
- Pass her shit tests
- Don’t show weakness
- Dominate other men
It is obviously optimal for marital harmony if the wife always sees her husband in social contexts where he is top alpha. When you throw a party, other alpha males act at the party as if you are the top alpha, even if in other social contexts you are not. So having someone else preside over the marriage is not a good idea. Marriages should resemble the marriage of Boaz and Ruth – unless the bride actually is being assigned to someone else by a powerful human alpha, as tended to happen during the early days of Australian settlement. If we look at first millennium Christian doctrine on marriage, it appears that marriage is a sacrament performed by the husband with the priest being wedding organizer, rather than presiding over the wedding. Existing Catholic doctrine is that marriage is a sacrament performed by the husband (which was very recently re-interpreted as the husband and the wife), but the priest presides over the ceremony, with the husband not being the alpha male in that context. Anglican doctrine back in the days when it was actually functioning as a religion is that marriage is and is not a sacrament. The articles say it is not a sacrament, but the preamble given by the priest in the book of common prayer treats it as a sacrament, and in the ritual the husband performs that sacrament.
He takes the brides hand, and
With this ring I thee wed
And then the priest tells the congregation what just happened, describing it terms that make it sound mighty like a sacrament performed by the husband. So, marriage is a sacrament or something very similar performed by the husband. And we know from evolutionary theory, PUA theory, and PUA empirical observation that this is in fact what women want – which suggests that the husband, rather than the priest should preside over the marriage, with the priest acting as wedding organizer and second in command at the party.
To get women to collectively behave better, women have to be informed as to what behavior is good.
Depict wives and children interacting with husbands and fathers the way they were depicted on television and movies after 1933 and before 1963. That will inform them. We cannot do that till we are in power. But while out of power, can restore the marriage ceremony to what it was before 1928: Wife promises to honor and obey, husband promises to love and cherish.
And let us go back a bit further, nine hundred years further. Husband administers the sacrament of marriage. Technically he still does: Takes wife hand. “With this ring I thee wed.†Places ring on finger. But that has been heavily played down for many centuries. It was a big power struggle in the Church of England after Henry the Eighth. They keep trying to make the marriage contractual (“I doâ€), when it should be sacramental (“with this ring I thee wedâ€). Women really hate contractual marriage. Contractual marriage is failing a shit test right at the starter’s gun.
We also need to restore the tradition that is implied in the story of the wise and foolish virgins, where the husband mock abducts the wife to a big party which he emcees, and everyone at the party treats him as top alpha male. Abduction, or else someone with family authority over the bride gives this woman to this man, leading her to the man. “Who giveth this woman to this man?†Women do not really like consensual and contractual marriage, hence the need for the bride to be given away or abducted.
Liking the posts hammering out the core points and positions.
Thinking about reproduction of progressives.
All else equal, a system with lower reproductive potential will with many iterations become insignificant next to its more reproductive variant.
In the end, social instability has the same effect as lower prosocial fertility. Progressivism aggressively causes unsuccessful intersexual relations and social instability, acting as a long term suicidal lure. Follow that lure and end up in the void, one way or another.
So, how exactly does successful reproduction of progressives take place? Some of them are shit people following their shit nature and these people do not reproduce much, produce reproductive offspring, reach status, or anything much.
Others are the sociopathic status maximizers type and will tend to live their life quite gnon compliant while tolerating and pushing degeneracy on others. Is this a stable strategy or dependent on other systems pushing gnon compliancy, and thus also void bound?
Is there purely progressive reproduction that works on its own?
Progressivism doesn’t reproduce. It is a glitch in the system- humans are hardwired for tribalism so if you want to seize power you form a synthetic tribe. If you are doing that internally, you need something that other people can’t just switch to easily which means it has to be harmful to people who adopt it.
Not much successful reproduction by progs. If it happened, prog Jews would be doing it.
In general, a sexually successful prog acts like I act, or even more so. He just does not talk like I talk.
What is “sexual success� when does it ever mean something other than quality and quantity of bloodline? and are you still using Boomerspeak because you are, in fact, a Boomer?
Sexual success, mutational load, natural selection and consciousness-driven selection and so forth are biological terms. Marriage is sort of a religious term, not just observing a kind of behavior, but calling it Divinely ordained.
And is Jim “the Boomer†Donald using the phrase to describe his lifetime fertility highscore, or is he using it instead to boast about his successfully shooting blanks into as many sexy sexy SEA teens as possible?
Do not, as they say, words matter?
Oooh, you said his last name that everybody already knows and is literally posted on his web site. Reminds of the morons who think chants of “Teddy Beale” is Vox Day’s Kryptonite.
Only one group of people thinks like this. Go back to your employer and tell them to write you a better script.
Sexual success is fathering at least 3 children (well, more than 2.1 to be precise LOL 🙂
Progressives reproduce memetically, by recruiting other people’s children into their non-reproductive lifestyles. As with other such movements like the Shakers, the memetic hare outruns the genetic tortoise but eventually loses the race.
Other people have to halt this recruitment – which means the time has come to bypass to the government education system. If you want grandchildren, sending your daughter to the government education system is a fail, and you should try to minimize your son’s exposure.
“Progressivism doesn’t reproduce.”
“Not much successful reproduction by progs.”
“Progressives reproduce memetically”
Are you saying that as a tendency or generality? I buy the first, not the second, having grown up around several large lefty families and seeing that pattern being quite common, although less so over time.
They marry, or some don’t and just act like they are married, they stay together, they even have unusually large families with 5+ kids sometimes, often adopting a negro or indian too. They get with all the latest prog memes as they show up, many of their kids go right into antifa or prog art academies or so, they jump the gun with the latest fads of faggotry, etc.
I provide this as counterexample the clear general trend, perhaps it is a eurocommie phenomenon. Nothing about the family situations seemed anti-life. But none of the girls have a single kid yet, ranging 25-33.
Generational hypocrisy effect. The parents talk the progressive talk but do not walk the walk. The kids hear the talk, and then walk the walk, not having been told that the talk is just talk. This leads to their genetic extinction a generation or two later.
Your personal experience doesn’t change the below-replacement fertility rate and staggering inceldom rate. You’re clearly looking at outliers.
He is looking at older outliers – the ones who got the joke. But their children failed to get the joke.
They absorbed a more masculine culture and wanted to signal as being less masculine / less “slut shaming” than that. Their children who were raised in a less masculine culture still want to signal lower masculinity and they go over the threshold of total emasculation / slut pride.
I don’t really think the older progs were in on the joke they just had a more functional framework and only rejected it a bit at a time.
I am absolutely sure that the older progs were consciously faking it, pretending to be cruel, evil, hateful, insane, malicious, and viciously self destructive, totally faking it, and the people around me are genuinely cruel, evil, hateful, insane, malicious, and viciously self destructive. It is their hatefulness to those closest to them that is stopping them from reproducing. The older progs were hateful to those that were not quite so close at hand, so their hatefulness did not impact their reproduction so severely. Their cruelty and malice was less self destructive. They would go after members of their own class, race, ethnicity, neighborhood, and religion, but not members of their own family.
This stuff where weddings and thanksgiving dinner turn into battle grounds is new, and is impacting reproduction directly in ways that older progressivism did not impact reproduction. As politics goes further left, families are becoming further fragmented. As families disintegrate further, evil that was abstract and deniable, evil that one could hallucinate into virtue, becomes evil that is right in your face. Disloyalty to near manifests as disloyalty to very near.
Basically it takes a couple of generations to go full regard.
Progressives were always iconoclasts, like the Calvinists they descended from. It just took a while to progress (ha) from regular cult to suicide cult.
My experience exactly. My mom was a headstrong feminist teenager in the 1950s, for which her mother and aunt mocked her mercilessly. Then she turned 30 and started seriously looking for a husband. She wasn’t happy that the guy she found had a crazy ex-wife and three kids, but she married him anyway, cashed her last paycheck, and had two kids.
My sister and I were raised feminist and cast adrift in the dating world; unlike our mom, we didn’t have any other value system to fall back on.
[…] Source: Jim […]
Did not expect this week to be blessed with Good Content.
To say this is worse then female suffrage is to overestimate how much value women place on keeping their word when they don’t feel like keeping their word which in almost all cases (I’ve known ONE strong exception to this) is zero.
Of course honor and obey should be restored to the marriage ceremony but lets not pretend women place their word over their feelz.
Now women have their whole conformity instinct and ability to be influenced by the media so perhaps they can be mindfucked (the way the Cathedral has mindfucked them but in a good way) to place loyalty and keeping their promises above all…
But without doing this making them change what vows they say is totally useless because women do innately value keeping their word or dealing in good faith.
It is a matter of frame. “With this ring I thee wed,” is a man claiming a woman as his own by his own right. It has nothing to do with consent. Her changing her mind is irrelevant because her decisions were not a factor in the marriage. Nonconsent is sexy, and “I do,” is asking for consent from the women, which is not sexy. It sets the frame of the man as supplicant, instead of master.
If consent isn’t important, then why do your overlords focus so strongly on getting your consent to be screwed?
What about all of the things which individuals choose freely and individually to satisfy their urges according to the eternal NAP principle?
Ask your own God: did the Devil ever coerce anyone to do anything?
https://i.imgflip.com/2lt7zp.jpg
I highly suspect that Setarcos will fail the WRP test…
Probably. It reads like CR; a bad mix up of WN linguistic tone and libertarian memes as understood by insane progressives. Jim must really irritate them that they keep sending new ones.
Ever think that this is the result of our success? We used to joke that the FBI agents that monitored us would end up becoming crypto-shitlords themselves. I wonder if that effect caused them to switch to what are essentially human-run chatbots?
The elite run society, and not by consent. Consent is for business, not for politics or sex. Any superficial resemblance to the “consent of the governed,” is them trying to abide by their own memes while imposing the rest of their catechism on the nation.
Remember, progressives pass almost everything policywise through compliant judges, such as gay marriage. People were against gay marriage and voted against it until a judge passed it through, and then they were always for gay marriage. That is not consent, that is by fiat of the powerful.
Consent is superfluous to human reproduction. Resistance is a test, and overcoming that resistance–bypassing consent–passes the test.
Marriage was legalized, but is anyone forcing you to get married? Vaginamarriage was illegalized, but is anyone forcing you (both) to get divorced?
Is anyone forcing you to drink or get tattooed? Is anyone forcing you eat ultraprocessed junk “food� Is anyone forcing you to drink andro-laced water? Is anyone forcing you to watch subversive flicks? Is anyone forcing you to send your children to public school?
If a ruling aristocracy’s ruling apparatus didn’t have an internal logic to it, would it not be displaced by another, superior, more orderly ruling aristocracy’s ruling apparatus?
Or are you going to continue to squeeze your eyes wide shut?
It is coercion that prevents us from seeing heterosexual role models on movies, television, and dance videos, and it is coercion when police burst into a man’s house and force him to fail his wife’s shit tests.
It is coercion and intimidation that prevents people from seeing what is in front of their noses.
@Setarcos, how right you are: Coke vs Pepsi, we do have a choice.
I had to read this comment a couple of times, but I think you expect us to answer ‘no’ to these questions?
The answer to your questions is ‘yes, of course we are being coerced.’ Thats why it works.
Is coercion ever “one way� Do you not have the opportunity to “just say no†to the false n-chotomies under which you labor? Is each decision you make to choose of a prefabricated option not an implicit “buy in†of the encompassing paradigm?
Are you responsible for the conditions of your life, or are you the victim of circumstance past? Will you be the author of circumstance future?
Coercion is always one way. That is what coercion is.
I struggle against the circumstances imposed on me, and routinely risk jail and loss of my assets for so doing. I necessarily conceal my conduct, my lifestyle, and my political views, because of the likelihood of state violence and nominally private state sponsored violence.
That I resist does not make it any the less coercion, does not make my superficial submission and apparent compliance voluntary, and that my resistance has some limited success does not constitute me coercing the state. It constitutes the state being less than entirely successful in coercing me.
Do you always talk in question marks when you can’t find any weakness? When you do that in real life, do you end the questions on a high note like a girl? Have you ever considered transitioning from a man into a girl because you talk like a girl?
I kid I kid.
Coercion is always one way. That is the point of coercion.
It is possible to refuse false life scripts we are offered. But it is hard. We are figuring it out as we go along. For instance, my friends worry that I’ll socially isolate my children if I do not send them to public school. My friends do not put a gun to my head, but they warn me that society might put a metaphorical gun to my head. That is the stuff we are thinking off.
I think this is an attempt as gaslighting? Social proofing that there is logic to the progressive motivators? DARVO tactics? Either way, incredibly low energy posting.
The logic is argumentum ad baculum. The replacement is occurring as we speak. Will you please send us back CR, or at least someone more competent than you? Your low effort trolling is lame and boring.
Will you attack the man, or the idea?
What ruling aristocracy has ever replaced itself? What ruling aristocracy has ever been based on anything but [its own] blood? What ruling aristocracy has ever empowered its subject sheeple except as necessary to secure its power against a competitor ruling aristocracy?
Will you attack the man, or the idea?
Rulers that fail to breed, as for example the Roman Aristocracy, necessarily wind up replacing themselves with hostile aliens.
Always happens, regular as clockwork, every declining empire, every declining civilization. The Turks revolted because the Turkish empire had become the anti Turkish empire.
Forget me, I’m gone.
I almost made it before then was drawn back in by reading articles I should have simply ignored.
The host, our fellow anglo, sharing in our collective guilt for the French, Russian and American revolutions, has finally begun silently deleting without comment, and that’s perfectly fine with me.
Delete-then-respond is infuriating and makes me do bad optics in my mind. This is far better.
You should just forget all about me. If this little post-libertarian daisy chain says dumb things on the internet, that’s not really something I have time to care about anymore.
I’m free of neo-reaction. Just another Jewish controlled opposition. Before McShlomo Donaldberg starts whining, I’m talking about bloody (((Moldbug))).
Seeeeeeya
Promises, promises.
The problem was, and is, you are unresponsive. You don’t make arguments, instead attributing your position to those who reject it.
we respond by rebutting your position. You proceed as if no rebuttal had ever been made, as if not only was your position self evidently true, but we accepted it as self evidently true.
I therefore adopted a policy of censoring everything that implicitly made claims without acknowledging the rebuttals, or responding to the rebuttals.
You never responded to any rebuttal, just kept on assuming that we agree that cultural Marxism is self evidently true.
Great to hear CR, I’m happy for you. Perhaps now is the time for those long walks through nature, or maybe you could learn an instrument? A violin perhaps? Like the smallest violin in the world, upon which I am currently playing the goodbye-CR song?
CR and I are not the same person. I have no idea why he replied on my behalf.
You (Setarcos) and CR sometimes have similar IP addresses.
Your stuff keeps getting held for moderation by IP addresses I marked for moderation, due to repetitious NPC political spam long before you showed up.
We need to have implications of your questions spelled out, and the process of reasoning whereby you deduce those implications spelled out, because we don’t believe your questions have the implications you imply.
I suppose the argument is that no one is literally putting a gun to your head and telling you to drink soymilk, just putting a gun to your head and telling you to fork over $1000 or so per year in order to subsidize the soy industry, so that’s OK. Also, nobody is putting a gun to your head and forcing you to watch Star Wars: TLJ, just threatening you with permanent disemployment if you ever try to make or participate in the making of any film that is less woke than TLJ, which is also OK.
Am I getting all of that right? Indirect threats, mass propaganda (paid for by your taxes), sustained attacks by the Official Press, and systematic exclusion of non-progressives from positions of influence or power are definitely not examples of coercion, because no one literally has a literal gun literally pointed at your literal head.
@Tom
That is one of the very few times Ive seen anyone correctly use the word “literally “
And it was well done. Id say you figuratively skewered him!
Did I make a moral argument? Do I care about moral argumentation? Do I appear a moralist to you?
Do you desire understanding of the nature of the order in which you live, or not?
Do you expect me to know what “TLJ†is?
P.S. Dear
RonVlad, I tip my fedora to you.Yes you did make a moral argument. You claimed our rulers rule by consent.
They do not, except in the sense that their subjects do not yet engage in armed revolt.
You claimed we are not being coerced.
We are being coerced.
You claim the culture is spontaneously arising from below.
These are all moral claims and moral arguments, and they are the moral claims and moral arguments our rulers hypocritically and absurdly make.
The culture is being imposed on us from above.
I expect you to Google it if you don’t know, not project your ignorance into a public spectacle in a disingenuous and effeminate attempt to make yourself the center of attention, you pretentious asshat.
“Will you attack the man, or the idea?” You don’t have any ideas, so attacking the man it shall be, to the extent that an anemic soylet can call himself a man. So far, you have literally not presented a single actual argument or fact, not presented anything that is not an interrogative, not presented anything that is not a vomit-inducing mash-up of degenerate left-libertarianism, critical theory and mangled Jacobin tropes.
Your Disinfo 101 strategy of needling people with vague, inane and barely-on-topic questions is not going to win the day. We tend to notice these things. Stop asking suggestive questions intended to disclaim ownership of your actual opinions and demonstrate (unsuccessfully) how clever you are. Grow some balls and tell us what you really think; or better yet, go away.
Too many questions, not enough statements.
You [Setaracos] are adopting the behavior of someone in a high trust position. Ie, a respect priest, philosopher, professor, wise man.
But that only works (to the extent that it does with weak people) bc you are mimicking the *behavior* of someone who *is already trusted* by the listener.
Someone who is weak might go for that bc they would unconsciously assume they trust this person who is acting in the manner of somone already trusted, much like acting confidently around girls inspires trust.
What is that indicator? (rhetorically asked)
It is that you are assuming we wish to invest effort in answering your questions. That is the kind of thing we do for trusted authorities.
You are not a trusted authority my friend, you are a total unknown. Meaning i have no knowledge as to either your understanding of the matter at hand or more importantly, your integrity.
Meaning your questions do not have the importance of a trusted priest asking them, but of a random idiot.
I am not saying you are a random idiot, i am however, saying that until you demonstrate otherwise, your questions have that status.
As such, they get glossed over.
And thank you for inspiring me with a new name!
Eh, i menat the above reply to be directed at Setaracos
Quoth Jim, “They do not [consent], except in the sense that their subjects do not yet engage in armed revolt.â€
Right you are!
But it’s better than that! Every single choice you make of the preapproved options presented to you for your “consumption†constitutes a droplet of consent! And what is consent but an ocean of droplets?
When asked, “Coke or Pepsi?†the pusillanimous masses choose the tastier HFCS brew! When asked, “Republican or Democrat?†they consent to be governed! When asked, “Harvard or Yale?†they send their flesh ‘n blood off to strangers to be educated according to the prestige [n. pejorative] of the name on the tin!
And when you shill for Trump, who for all his faults is the nearest thing to a true political “outsider†in generations, do you not nevertheless reinforce the legitimacy of the system in toto, which is by conscious design: vast, obscure, byzantine, and ancient?
Who is going after the Amish? No one is going after the Amish.
In an age of infrastructural fragility and governmental incompetence without historical precedent, who is engaging in the actions necessary to bring the negotiators to the negotiating table? No one is engaging in these actions.
If a “consumer†is one who consumes, then what is a body politic wracked by “consumption�
Actually, they are going after the Amish, in the sense that that they are steadily increasing the pressure on the Amish to give their children a progressive education.
Unresponsive:
That your questions are intelligent, on topic, and relevant is exactly what is disputed, and merely asserting that your questions are intelligent, on topic and relevant is not a response.
You ask what are supposedly gotcha questions, as if it was self evident that they are gotchas. Your inteloctor denies that they are gotchas. To respond, must explain the chain of reasoning that makes the rhetorical question a gotcha.
Does it make any sense to go after the Amish when the so called “home schoolers†are so very much more prevalent and so very much more irritating to the school policy people? It does not.
Does your claim agree with the order’s observed strategy of going after its opponents in a “boil the frog†like fashion, weakest link first? It does not.
Where is the reply I sent to the other guy?
Are you really silently deleting comments as he claimed?
When it is almost the same comment as one already deleted, I silently delete.
One point about TLJ (and Molymeme said the same thing) is that it was almost a mockery of “wokeness” it wasn’t good but I think it accurately portrayed.
The feminist/SJW leadership of the resistance was portrayed with realistic incompetence and the white males with realistic alienation. Laura Dern as the stupid annoying female admiral (whatever happened to the hot as fuck Laura Dern from Wild at Heart) was not at all competent and had no real plan even though she said she did and when questioned all she could do is lecture about toxic masculinity. The Force Awakens was actually far far worse IMHO.
I’m revising my conclusion from “troll/autistic lolbertarian” to “malignant narcissist”.
Dude fancies himself a modern-day Socrates, even uses an anagram for his handle, and asks question after question in what he undoubtedly thinks is a faithful recreation of the Socratic Method.
Except Socrates didn’t disguise trash logic and stupid ideas as questions. He didn’t ask inane, irrelevant and largely rhetorical questions in rapid-fire fashion without waiting for responses. The actual Socrates understood the arguments he was criticizing, asked very specific questions, one at a time, intended to get people to spell out their assumptions, and let them hang themselves on contradictions and hypocrisy.
Our new interlocutor, to use the term very loosely, simply wishes to prove how clever he is by asking what he thinks are very clever “gotcha” questions, but since he doesn’t actually understand the arguments being made, must resort to throwing out random questions that sound profound to idiots and might possibly be on topic in the sense that they share a tiny bit of syntax with the original thesis.
It’s obvious, it’s sad, and it’s kinda gay. Just act natural, bruh, if you can – you’ll still look dumb, but at least we can speak to you as a fellow human being and you might learn something.
Jim, my time is too valuable to write the same thing twice.
And yet here you are writing the same thing multiple times and having it deleted multiple times.
You are following the CR playbook, of telling us that we already agree that progressivism is true, or rather presupposing that we already agree that progressivism is true, and supposedly your questions are gotchas because we already agree that progressivism is true.
Supposedly, your questions about marriage are gotchas because we already agree with the progressive premise that marriage is legal, and men are free to marry, but for some mysterious reason are failing to marry women after women have partied for thirty years.
No, marriage is not legal, it is illegal. The problem is not that some evil feminists are forcing us to marry, but that some evil feminists are preventing us from marrying. We would like to be able to marry women the way people married for millenia before 1820, and the state will not allow it. It is not that we consent. It is that female shit tests are backed by cops and the state, so no one can pass, which is highly coercive and profoundly frustrating to both men and women, since the purpose of shit tests is to find men who can pass, and no one with assets can pass, except he is willing, or plausibly appears willing, to engage in criminal acts. Hence the female sexual fantasies about wealthy and successful crime bosses, demons, and so on and so forth. My marriages have worked because I plausibly imply I might have killed people and might well kill some more. I am the least poor killer chicks can find. They are so hard up for husbands who can pass the nuclear shit tests they have been given that they will marry stony broke drug addicts and men doing life in prison.
When cops burst down the doors of a man’s house to back his wife’s shit tests, he did not consent to that, and he did not consent to marriage on terms that would empower his wife to do that, and his wife never wanted to marry a man so beta that she could survive bringing another alpha male into her husband’s house. No one consented to having marriage illegalized. This was imposed on married people by a handful of childless single lesbian perverts.
And similarly for all your other gotchas. I have never seen a white male get fighting drunk. Your questions about prole culture presuppose the problem with bad behavior in our inner cities is us behaving badly, is white taxpayers behaving badly, rather than the people you brought in to live on crime, welfare, and voting against us, and presuppose that we agree that the problem is us, is white tax payers, rather than imported voters brought in to live on crime, welfare, and voting against us..
As soon as you start spelling out your supposed gotchas, you reveal you are doing what CR does, assuming that progressivism is true, and, instead of arguing that progressivism is true because such and such reasons, assuming we agree that progressivism is true.
No, we do not agree, and the presupposition of each and ever gotcha question that you deign to explain is that the question is a gotcha because progressivism is true and everyone, including us, agrees that progressivism is true.
I want you to explain why your gotchas are gotchas without assuming that we agree with the presuppositions that make the question a gotcha.
The point is not to make women say an oath that they will want to keep, but to frame the husband as the boss.
If you have social shaming and husband’s right to punish adultery, women know that not keeping their vows leads to tremendous feelbadz if not outright violence against their persons.
Precisely. It is not changing the wording to make the woman more likely to keep her word. It is changing the entire event organization to make the husband the boss and make everyone else respond to the husband as the most alpha male, cementing his place as the boss in her eyes. Setting the tone for the marriage going forward is important, because it is harder to change it once you begin.
The System is the most alpha male. There is no amount of pathetic PUA AMOG LARPery that can disguise this fact. The System is the Ultimate Alpha because you work hard on behalf of its continued might, joyously pay its taxes, gratefully relinquish your children to its facilities, willingly install its technological matrix of control into your house, and enthusiastically invite its high-speed porno delivery network into your home.
The System subjugates you because it can. It doesn’t have an ancillary reason because it doesn’t need an ancillary reason. If you had a hand in running The System, or your little corner of The System, its bit would be softer in your mouth. If your latent capacity for insurrection were greater, its saddle would rest more easily on your flanks. From this observation we receiveth the Calvinist notions of self government, self education (sola scriptura), and an armed citizenry.
Uncle Sam the pimp is indeed the greatest alpha male, under us however he’s not going to be an option.
And precisely for reasons related to this supremacy, “the system” must be seized by rational men, and used as a supreme alpha (or better yet, the representative of the supreme alpha in the sky) who will dole out virgin wives for the worthy.
That game advice was me, Setting the Record Straight, not Stares at the World lol.
aidanmaclear.wordpress.com/2019/04/10/game-advice/
Clearly, you need better branding ðŸ˜
I stand corrected.
Seems to me we don’t particularly mind the atheist arguments against God, in that, as proof of God is unfalsifiable, we have sympathy for the atheist line of thinking. We do however mind the nihilism atheism logically leads to — we are white pilled, not black pilled. So, we say life has meaning. The universe ‘wants’ us to thrive, demands we thrive.
Which theoretically puts us in the tradcath camp, although we don’t get much traction there. Our definition of God is different, I think. They think our God is too indistinguishable from Gnon, we think they have some Darwin acceptance issues.
Modern weddings are indeed super gay and I’ve been to a few. Including one with a female “pastor” who began the ceremony with “take her hands in yours. These are the hands of your best friend…”. Totally illegitimate marriage, groom probably cuckolded at the bachelorette party, all involved should have been hung.
I also remember one where the floral arrangement was so spiritually unclean and contrary to the purpose of a marriage, cut flowers completely sealed in glass jars full of water and lit from below with an unnatural lavender light, that I can only assume the (likely homosexual) wedding planner was wishing disaster and infertility on the couple.
You are also right about the MCs; the weddings I’ve been to, the husband stays quiet and does not lead anything. He lets himself be shuffled around along with the rest of the guests by the DJ.
Yes, lot of satanism among wedding planners. A substantial minority of them would be right at home in the temple on Epstein’s island. Also, a lot of their emcees are gay.
Then there is the part how brutally expensive modern weddings usually are. This sets a completely wrong starting position and mood, the groom pays like $30K, often he does not have that money so from credit, and it is “her big day”, not theirs but her etc.
How a woman relates to all this is a big green or red warning light about the marriage.
I was very lucky. She told me if I want to propose, just get a cheap silver band, let’s spend on useful things like furniture, not stupid crap. This was a very good sign.
For the actual wedding she tracked down a wedding gown salon that was going out of business and bought one cheaper than renting it would have been, I had some of my old gold bling-bling I never wore anyway for rings, found a restaurant with reasonable prices that allowed us to bring our own liquor, people from here village sent an immense amount of homemade cakes and pastry, instead of renting a luxury car my uncle was happy to play the role of the chaffeur with his big BMW, and there is custom here that guests contribute to the wedding costs by paying for a short dance with the bride so we nearly broke even.
And our mood was that we were happy that we were smart about keeping the costs down, she did not try any kind of a “spend on me lavishly to show me you love me” kind of shit test.
We had an MC, of a traditional kind, could not avoid this custom. He was generally terrible, saying a lot of verses, poetry that came from old traditions nobody had any idea about, while nobody paid attention. Only thing I led was the the important, symbolic, formal opening dance, but I was tired enough anyway, it is good that there was someone at least trying to entertain the guests because I really did not feel like entertaining them myself. I could just relax and enjoy it this way. No DJ, just a good folk musician.
We were intending to do the mock abduction, but someone from her village told us a story that not so long ago that a piss drunk groom with his piss drunk friends managed to knock the bride’s head into something so hard she died on spot. This really soured the mood for that sort of thing so we skipped it. I expected to be piss drunk, I actually surprised myself that I wasn’t.
No, the formal opening dance is generally enough to send the message. The rest is just party.
Well, duh, when you do an abduction, you should be sober. Drunk is for when you are relaxing with friends, not for when you are doing bold deeds.
In the old prince valiant comics, I remember one story where he abducted his bride, the queen of some country or other. I remeber the scene where he entered the courtroom, disheveled, pissed off, and bloody. Ignored all the gay courtiers, i suppose the soldiers took one look and said “ok imma gonna wait on thisâ€. Stalked up the queen, picked her up, threw her over his shoulder and stomped out. Still pissed off.
The only way that scene would be allowed today is if both characters were homosexuals.
Your emcee is your enemy. He is there to amog you. The wedding organizer inserts him into your wedding as a shit test. Don’t hesitate to threaten him with being fired on the spot and physically tossed out of the wedding. Make sure your best man is willing to physically help you throw the emcee out hard enough for him to bounce three times. Check with the security guy and the best man as to what is going to happen should push come to shove, and if you are confident what that what will happen should push come to shove is unwanted guests flying out of the wedding in a high arc and bouncing several times on the pavement, then push will not come to shove. Make sure it is your security guy and your best man, not the wedding organizers security guy.’
Make sure your security guy is on your side. That way, you can call the tune. The groom needs to call the tune, and be seen by the guests and the bride to be calling the tune. Your wedding organizer is a woman, and very possibly a witch and a satanist, and she is giving you a shit test. And quite possibly, your emcee is a gay, in which case he also is giving you a shit test.
There was no wedding organizer, that is one of the unnecessary costs. It is easier than organizing a house renovation. Clothes, venue, flowers, photographer, cake, restaurant, musician, drink, that’s about it.
Could such a figure representing all that is gay and evil possibly be worked into a reactionary wedding ceremony?
Let’s say that the wedding is proceeding swimmingly, and suddenly an actor playing a homosexual emcee crashes it and attempts to shit-test the groom and tempt the bride into gay sin, but is denied an opportunity to wreak evil by the groom and then forcefully removed from the ceremony by burly men acting on the groom’s orders.
We’ll definitely need such psychodrama at least in the early days, when the memory of shitlibbery is still fresh. Brides need to see grooms as powerful men capable of destroying shitlibs.
One of the worst things about modern weddings is seeing used up brides wearing pure white gowns. Seeing Megan Markle wearing a sheer white gown was farcical. She was probably the least virginal women at the ceremony.
There should be no white gown or veil unless the bride is virginal. Where the bride has claimed to be virginal, the ancient tradition should be reintroduced of the mother of the groom or some other trusted person inspecting the marital bed after consummation to ensure that she was in fact virginal, with anulment being granted if not.
Where the bride is over 25 there should be a new tradition that the bridal gown is woven from animal-hair with no undergarment as penance for her short-sightedness, with no make-up or embellishments allowed.
Just to be clear, progs absolutely procreate, just not at replacement level. They are also wont to divorce, do-over, and adopt. Progressivism is the first ground up, alt-theistic religion utilizing memetic transfer. It is a parasitic ideology that requires trad families to grow.
How are the links illustrating the effects of gay on society coming along?
I would like an image of them transexualizing nine year old boys, to enthusiastic social approval.
I said I would promote the gay comment, with some edits, to a post, but only after I posted on marriage. Well, I have posted on marriage, and done some edits to the gay post, but I would like to, contrary to my usual practice, include some links and horrifying and disgusting images showing the damage that they do to us.
I’ve been away on a trip and now i am playing catch-up in school, so i’ve not done much. More to the point, i was hoping to hear some feedback directly from shamman before pushing further.
Would the baby-shaped dildo qualify?
This is a great one; shows you just what toleration of buttsex gets you, though no images.
“Urban gay male life had evolved over a decade from personal salvation into a communal identity and now, as the Saint [a famous disco] became our weekly Mecca, into a quasi-religion. Several thousand muscled, shirtless gay men in black 501 jeans … Upstairs was a huge darkened balcony converted into carpeted bleachers where hundreds of stoned men fucked all night and into the day. To lose oneself so completely in the wall-to-wall men moaning in the dark … soaring on a hit of ethyl chloride … was like being transported to some heavenly other planet somewhere beyond the stars.”
http://www.2blowhards.com/archives/2007/02/aids_and_immune.html
I love the poster’s “no homophobia in my comments please” at the end
Did you see the comment chain in a previous post about the 30 Reasons Why Homosexuality is Intolerable? 3/4 the way down or so under The General Flynn affair. Check it out. There have been a few rewrites and one of my posts contains a link to the *latest* rewrite as well as notes on what is needed in terms of sources, examples, and links.
That link you posted is an excellent “example.”
I did see it, which is why I went digging for this link as an example of how fucked up rampant buggery is.
That account is eye opening in the worst way. The comments are also a case study in how there is no middle ground when confronting the truth, and anyone that tries to create one has an ulterior motive (which isn’t always a bad thing but often is).
I’m collecting images and references for the Project as well, but i don’t know if it will be in time for Jim’s upcoming post.
A good reference for point 1:
Aesop, Fables 528 (from Chambry 118) (trans. Gibbs) (Greek fable C6th B.C.) :
“After he had created people, Zeus immediately implanted in them all the possible human character traits, but he forgot about Aiskhyne (Aeschyne, Shame). Since he didn’t know how to get Aiskhyne (Shame) inside the human body, he ordered her to go in from behind. At first Aiskhyne protested, considering Zeus’s request to be beneath her dignity. When Zeus kept insisting, she said, ‘All right, I will go in there, on the condition that if anything–or Eros (Carnal Love)–comes in there after me, I will leave immediately.’
As a result, people who engage in sodomy have no sense of shame.”
Not very strong as far as arguments go, but it sure illustrates that the concept of gay shamelessness is old as dirt.
I proposed to my wife by saying “I want kids and I’m not raising bastards.” She enthusiastically agreed.
I told her to buy her own ring and set a budget, she was a bit naive about diamond prices and ended up getting a garnet.
She wrote the vows, I told her if I wrote them I would say, “I am marrying you to own the products of your uterus,” which would be less than romantic. She wrote something a bit more flowery, but they were not symmetrical. The minister showed up, read exactly what we wrote, then left. There was no MC.
I made sure there was a full hosted bar, it’s the expense everyone is always eager to cut. No one gives a shit about the flowers, or centerpieces, or decorations, or anything else. Just let everyone get loaded. In the end it was far less than everyone freaked out over and my father in law picked up the tab. Total expense for the whole wedding was less than $5k.
I made sure there was a rule of no groom-insulting jokes during toasts. My best man was on board with this, no stuff like “Figure out which of you is the boss is and do everything she says.” I did not pay all this money to be insulted in front of my family and friends. Generally I ran the wedding, chose picture sites and groups, and roamed the room to make sure everyone was having a good time. My favorite picture was the one of me and all my friends smoking cigars.
Daughter arrives any day now. In part it was Heartiste and NRx which prompted me to make this decision, so thanks everyone for helping me over my nihilistic attitude.
Jim what is the role of the restored state if any in dealing with the hordes of existing women who have totally sabotaged their own attractiveness which distorts the pool in favor of the few remaining attractive women… there are too many women out there that no sane man would want to own even as a work in progress.
I’m thinking that hair for women should be shoulder length at least on pain of the stocks and if repeated a flogging if they show up in public without it, women who’ve lost their hair for medical reasons have to wear wigs.
Something should be done to make the fat women lose weight (gluttony is one of the few true flaws of capitalism).
Probably should prohibit tattoos under sumptuary laws, I would also generally forbid pants for women under the same… skirts and dresses.
Fat women will lose weight if we bring back fat shaming. Ironically, non-fat women are the most eager to fat-shame; they can go on for hours about it in private. They just need a little push to do it more openly, and white knights need to be severely punished.
I’d actually predict that severe punishment of white knights would, by itself, solve a lot of these problems in time. Women want to be wanted, and those with butch hair or aposematic colors will adapt when they stop getting positive attention for it. They’re already not getting sexual attention from the chads, but the insta-likes and beta thirst and “yassss queen”s provide a dopamine hit that the hindbrain thinks is better than nothing. Take away the cheese, and the mouse will ignore the trap.
How will white knights be defined exactly, we generally recognize it when we see it but we need to get more specific for a legal def as to what behavior is criminal whie knighting?
White knighting, like Homos hitting on men in public should result in quick private violence to resolve the issue.
White knighting:
I posted a picture on this blog of a girl gazing raptly at the photographer with her fingers digging into her pussy crack. A commentator denied that there were sexual feelings on her face, and denied that her fingers were where they were.
When I linked to the Chinese video depicting an underage chick hitting on teacher, commentator did not see what the video and the actress depicted, even though the actress was doing an over the top performance of a stereotypical girl doing a stereotypical hit on a higher status male.
But we cannot illegalize refusal to see:
Trouble is that refusal to see female misconduct that is there results in seeing male misconduct that is not there, and then attacking those males, results in attacking males that happen to be in the vicinity of misbehaving females. That, we need to illegalize and can illegalize.
What we need to illegalize is defense of unaccompanied women: Women should be accompanied by a responsible male who has proper authority over that woman, and he should have authority both to restrain her from misconduct, and to defend her against male attention that he does not want (irrespective of whether she wants it or not)
Illegalizing white knighting is inseparable from redefining rape and sexual harassment to be sexual attention that is contrary to the will of the man in proper authority over the woman, rather than contrary to the will of the woman, and inseparable from defining an unaccompanied woman as morally suspect, and in some circumstances illegal. The complainant in cases of rape or sexual harassment has to be the husband, betrothed, father, or person in loco parentis, rather than the woman, for woman rarely if ever complain about the behavior that we want to suppress, actual rape and actual harassment, and if they do complain about supposed rape and supposed sexual harassment, are almost always complaining about behavior that we do not want to suppress.
Illegalizing white knighting means that if you don’t have authority to restrain her slutty misconduct, you don’t have authority to defend her sacred honor against random males in the vicinity. If something bad is going down, you are supposed to call out. “Whose woman is this?”
You will notice that there is a pile of stuff in the old and new testaments, and in the Koran, and in traditional reactionary and patriarchal literature, against women doing stuff to attract male attention. Women are supposed to make themselves pretty, but not engage in attention getting behavior. Sometimes it is hard to draw the line between the two, and the distinction depends on the social occasion. Also depends on the man supervising the woman. There is a pile of stuff criticizing romance literature. There is nothing, zero, criticizing women watching porn, diddling themselves, or owning sex toys, nor should there be. We only complain when women diddle themselves in public. Romance literature is way more immoral and corrupting than porn.
Precisely the thought that came to mind when TC asked for a legal definition. If you don’t own her, then you don’t defend her, full stop. Responsible men, upon encountering an unescorted woman, shall either refuse to acknowledge her, attempt to return her to her husband or legal guardian, or optionally take possession if she does not have either.
As an American living in America, you may had no opportunity to see an Orthodox Jewish marriage ceremony. The Father of the girl and some male relatives, the boy and his male relatives and the rabbi sit around a separate table and discuss the terms of the Ketubah, the marriage contract. The traditional ketubah deals only with material aspects: what the boy gives to the girl as personal property (dowry). That is to ensure that she will have a home and income even if she is abandoned. Traditionally the dowry also included dresses and jewelry. Then the discuss what will happen if she wants to divorce: she had to return part of the dowry. Then what is the man decides to divorce: he has to pay a large sum and maintenance to her and her children. What is he want to marry an additional woman (it will cost him). Everything to ensure the stability of the marriage and the welfare of woman in case she is left with children. Then everybody signs the contract plus two witnesses. The male relatives of the contracting parties are charged with enforcing the terms. The girl (and females) are not consulted nor informed formally. Obviously the Jewish marriage was developed in the desert, where there was no State nor Family Judges nor family police. Yet it worked well … till the damned Enlightment.
cont. Another point in Jewish marriage, sometimes written down explicitly in the marriage contract, is the right of the married woman to be impregnated by her husband to have legitimate children. Apparently, in those arranged marriages this was a problem. I cannot imagine two young people in the same tent and not having sex. Was homosexuality common among Jews? Apparently, yes.
Apparently my fellow Eastern Orthodox Christian readers are all taking the summer off from commenting. I guess it is up to me to point out that the Orthodox Church did not catch the Enlightenment disease, and so its wedding service is much as our host describes.
For example Ephesians 5:20‑33 is read, and there are no “vows” nor other elements of a contract– people break contracts all the time, and besides at the time the service evolved there was no notion women making contracts.
What’s more, the priest prays, …grant unto this woman to be in all things subject unto the man, and to this Your servant (i.e., the man) to be at the head of the woman that they live according to Your Will.
That’s the sacramental part. As far as the party is concerned, it would be unthinkable for it to be any way other than Jim puts it. Your best man is your emcee, toastmaster, and security guy all in one. Hopefully he and your wife’s brothers have learned to get along.
This has been the way of doing things for hundreds of years in the East, attenuated in places by the communists last century but making a recovery. It is there for people in the West to recover too.
Yet you say that the priest is the minister of the sacrament, that he does marriage to the man and the woman.
Pretty good, but 5:20-21 does not belong with 5:22-33, and the sacrament belongs to the husband, not, the priest.
I expect you will find that in 1900 or so, it was 5:22-33, not 5:20-33, and the priest took the sacrament from the husband around 1500ad or so.
The rot is spreading fast in the Orthodox church as our countries become subjugated to Cathedral hegemony, compounded by shitlibbery becoming trendy among our elites.
20 years ago, I witnessed exactly what Mike observed about MCing, toasting and security by the best man (and the groom’s friends as a broader group). Back then, there used to be mock battles between the groom and his friends and the bride’s male relatives to simulate abduction. The best man was the only one sober because he was the designated getaway driver.
Last wedding I went to had the band leader dragging the groom around by his nose. I came as part of the groom’s party, but there was no mock battle, the decorum was very womanly. Disgraceful.
In regards to marriage and parenting, I have a friend who is having difficulty disciplining his adolescent son when he acts out and misbehaves. Any punishment he levies is objected to by his wife and mother-in-law as too harsh, even just normal things like taking away toys. The scenario then turns into him arguing with both women for their approval of his authority.
I’ve pointed out, the battle is already lost. If the son can plainly see that the mother does not obey the father, he will see no reason to himself. The mother and grandma are higher authorities he can appeal to for amelioration of any punishment.
My friend is decently purple-pilled but still thinks he can appeal to his wife’s logic and reason to respect him. What he really needs to do is throw out the undermining mother-in-law by the cuff and beat the insolent wife, but obviously he would never do either and both would trigger massive legal punishments. What advice would you give to such a person?
Pass his women’s shit tests.
The sixteen commandments of poon.
I had a Taiwanese friend living in the US with his Taiwanese wife, mother-in-law, and newborn son. When I suggested breastfeeding instead of outrageously expensive baby formula, he agreed but said, “You cannot argue with Chinese women.” So we’re not the only race that’s lost that battle.
Chinese, like everyone else, fold in the face of a male confident that women should obey. Red pill positions, backed by male authority and male charisma, are compelling.
Authority says he is authority, and you should believe authority because his authority – which circular argument is difficult to doubt if authority could deliver a spanking, and might well do so.
Being a man, you are stronger than they are. If, in addition to being physically stronger, your faith is stronger than their faith, then your faith is irresistible. Deus Vult.
Faith without compulsion is impotent against sacrilege, compulsion without faith impotent against defiance. Faith with compulsion is irresistible.
I don’t understand this part. Is he saying that women should keep other women in check?
Imho, it says that if a believing wife has a non-believing or not-stalwart husband, her subjection to him along with her conversations with him, might win him over to the faith.
Yup. This is how St. Monica converted her husband Patricius.
I was confused too, so I looked up some commentary. There’s a lot of archaic language; “conversation” actually means something more like “behavior”, the first “word” means the gospel, the second “word” actually means words. It seems to be a very archaic pun.
But essentially it’s explaining the reality of how Christianity initially spread. Christian women taking heathen or Jewish husbands elicited conversions not by being belligerent and ostentatious, as progressive women are, but submissive and virtuous, in line with the Christian ideal. Because that is precisely what men want to see, and what they respond positively to.
If the reactionary program takes off as a religion, many male conversions will result from observing how our women act in public.
The virtue of the Christian wife shall impress her non Christian husband.
In a Roman Empire that could no longer reproduce successfully, God is the alpha male whose ability to enforce cooperate/cooperate equilibrium among his followers impresses.
Recollect “South Park”‘s criticism of the Mormons. South Park complains that Mormonism is a blatant scam, but it works. Peter wants the unbelieving husband to say the same of Christianity. He is also promising the wife that if she cooperates with her husband, and her husband therefore signs up with the Christians, her husband will come under social and divine pressure to cooperate with her.
Husband thinks: “This is a good wife, so I had better get on the good side of the top alpha male of her faith”, signs up, they both get commanded to adhere to the precepts of Christian marriage. Thus Christianity grew both by conversion, and by reproductive success in an empire suffering reproductive failure.
Thanks all that clears it up. Makes me wonder how many more biblical texts I don’t understand.
I wonder why such an appealing religious arrangement isn’t wildly popular today, but then I remember what you say about entryism and cops stopping men from passing women’s tests.
Observe the media promoting Peter Buttgig as a real Christian, much more real a Christian than those horrid Trump voting Christians, notwithstanding his democidal rhetoric against Christians and Christianity that suggests an intention, in the unlikely event he makes it to be president, of physically exterminating any remaining Christians.
And if you show up for Church, your pastor is likely to resemble Peter Buttgig – who will denounce you as Homer Simpson for showing up.
I’m currently in the process of planning my own wedding (obviously no $30k wedding or jokes at the grooms expense), and I wanted some input and tips.
How does one actually go about having a non-satanist wedding? Where can I find a normal, proper priest that will read the letters mentioned in this post, or something similar, or is it impossible in modern society?
Any tips much appreciated
Your wedding organizer is not on your side, but she is just giving you a shit test. Chances are that she is no more inherently evil than any other woman who finds that men keep failing her shit tests. You pass her shit test, and you will be fine. You will very likely need to briefly raise your voice and physically dominate her, but if you do, it will go down as smooth as chocolate, and she will then do a good job. Priests may be a harder problem, but reactionary priests and pastors are less rare than they seem. They are just flying under the radar. Download your religion’s old wedding ceremony from the internet.
No need for a wedding organizer. All one needs is clothes, rings, venue, restaurant, menu, drinks, photographer, flowers as a bouquet and as decoration, musician and cake. These were simple enough to organize.
You forgot guests. Organizing them can be a pain.
You’re right, I forgot that and indeed that was annoying, thankfully nobody had fancy stuff like allergies, but it was still annoying.
I believe Jim that wedding organizers can be bad. But since their job is is trivially simple, yes except the guests part, a couple can DIY it and save that cost. Do not hire a wedding organizer. Leave the annoying details esp. about guests to the girl and just make the strategic decisions. Wedding organizing is very similar to womens typical job in a marriage i.e. kids birthday party. Don’t marry a woman who refuses to do it, she is lazy. She does the details, you do strategic leadership. If it does not work, the marriage won’t either.
I have a friend who was married by the RCC in a Latin marriage rite, and I figure that since your wife doesn’t understand Latin, similar effect to you performing a sacramental marriage. Tho I don’t see a Latin Rite RCC performing a marriage for you if you’re not a parishioner. Find some Prot minister who will read vows you write if you’re not committed to a denomination.
I plan to make it official in a church with a ceremony, but the real marriage is created when you give your girl a creampie and put a ring on her finger.
Throw a big party outdoors and have your friends provide food, liquor, and entertainment in lieu of wedding gifts. Don’t “mingle” like a fag, make the guests come to you to wish you well and make conversation, and you or your best man should be leading the proceedings.
Somewhat related to this topic, Ramzpaul published a new video yesterday in response to Stefan Molyneux’s admonition for women to have children early. See here: https://invidio.us/watch?v=a3k1xXemyh8
Could you describe in detail the reactionary marriage for those like me who did not find the instructions of the ancient rite? Exactly what should the priest say and when does the husband start talking?
Well, thought I did – but I was trying to describe what good marriage ceremonies have in common and bad marriage ceremonies have in common, rather than nail things down to one specific rite. I am not a wedding planner, and when we have a reactionary state, some weddings are going to be built around a mock abduction, some are going to be built around the bride being given away, and some are going to be built around a real abduction, so there will necessarily be variations reflecting varying circumstances.
1 The groom should be the big man at the wedding, the host, the guy throwing the party. His best man, his organizer, his priest, and his security guy should take care of making the wedding happen as planned, but he should be seen to be in charge. He should greet the guests, not the wedding organizer’s emcee.
2. The central event of the wedding, that it all leads up to and down from, should be “with this ring I thee wed”, irrespective of whether the bride is given away, abducted, or mock abducted.
3. Followed by preaching on marriage from the priest, which should include the biblical verses mentioned, also the corresponding verses for the husband, but not 5:20-21. If no priest, the groom reads the verses after bestowing the ring, or the father giving away the bride reads the verses before the groom bestows the ring.
Jim, random thought illustrating hypergamy. Both the wife and I have noticed (independently) that the Duggar daughters are more attractive than the daughters in law (the sons and daughters come from the exact same stock). The difference isn’t striking (parents influence in choosing spouses + insular religious community). Is this not an example of hypergamy – the men, particularly if they marry young, have to marry down.
Dr Edward Dutton did a video on sexual repression. Especially when its confined to wedlock.
By elevating K-strategy and subsequent redirection of sexual energy into creativity leading to men like Isaac Newton and Nikola Tesla.
Do you agree that such a thing due to sexual transmutation of energy elevates genius?
https://www.youtube.com/watch?v=4K1ww9eiovQ
Nah.
That is the blue pilled version. Creativity reflects repression of women, not men. As, for example, the classic Greeks.
Repression of women results in elite fertility. Elite fertility results in expansionist energy. The elite goes looking for jobs for their excessively numerous offspring. Which provides favorable conditions for Newton.
@Jim
I don’t think he is discounting the genius of greeks that result from elite fertility. Which is also expounded as contributing to genius
The same eugenic fertility is occurring in the medieval era to the 19th century.
Yet its sexual transmutation that supercharged creativity that already would have occurred much further than the usual.
I mean is it not coincidence that both Isaac Newton and Nikola Tesla are virgins? And they are definitely had a sex drive like all men. Why would this not help to supercharge their genius since the sexual energy already present is channeled into creativity?
You found two examples. Feynman was a PUA, Einstein was at least not virgin etc. Try to run at least approximate stats to make a point. Two examples are nothing.
I think innate talent always finds a way, even if you are busy fucking as Feynman was. But OTOH Tesla and Newton not passing on their genes is a bad. Let’s rather have smart men have many kids and that will very much make up for the rare case that some of them are too busy fucking to be creative.
none of the famous Athenians were virgins (Pericles, Thucydides, Socrates, Aristotle, Aeschylus, etc), least of all the most flamboyantly accomplished one, Alcibiades.
Even if repression of men did result in a few more men going on to become reclusive geniuses, we can’t ignore the obvious side effects, like 10x as many men channeling their creative energy into meth labs, prank videos and shooting up schools.
But genius is obviously correlated with elite fertility. The more smart people get to breed, the more smart people future generations shall have. And I don’t know about any of you, but walking on eggshells around “protected classes” tends to stifle my motivation and creativity in other pursuits. On the other hand, if one of my employment perks was a company brothel, I’m pretty sure I’d find a way to fit that in without losing any productivity.
Precisely why I included the confinement to wedlock in my comment. But those men serves as examples of the point.
Michaelangelo is also another example.
What does wedlock have to do with any of this?
It’s really not that hard to cherry-pick examples of socially or sexually-isolated geniuses. That does not prove cause and effect, especially when there are many counterexamples apparently disproving cause and effect. If there is a causal relationship, it could easily be inverted, i.e. eccentric geniuses simply don’t do well with women unless they use PUA techniques.
Most men unconsciously and instinctively use pua methods without awareness of what they are doing.
The smarter you are, and the larger the intelligence gap between you and your target, the more you have to bring pua to conscious awareness, and consciously use pua.
Yes, it’s why I consider the causation arrow to be either nonexistent or reversed. Constraining male sexuality does not create geniuses; rather, geniuses tend to be disproportionately incel because their intellect makes it difficult to communicate with most women.
If anything, society should probably make the restrictions on male geniuses even looser than those on regular men, so that they feel more alpha and develop more natural game without having to rely excessively on crude PUA techniques.
I agree. That’s why I linked the Edward Dutton video that cites various studies in regards to this topic.
Given what you have said it appears that such a mechanism if it exists serve best to enhance already existent genius.
Plus I think why I am talking about wedlock is that even in an apparently repressive sexual environment up to the 19th century it is a sole means of legitimate sexual expression and mechanism of eugenic fertility.
Steve Jobs is a counter-example. But then Da Vinci turns out to also be an example.
Very difficult to imagine the ‘Critique of Pure Reason’ being written if Kant had a wife and a hot mistress. Ditto Beethoven’s symphonies. But since the suppression was usually self-imposed (there’s a story that a french actress tried to seduce Tesla as a bet but failed) I think their genius caused the suppression, not vice versa.
I suspect they understood what the Greeks and authors of the Bible did: that sexual attraction for a man is base and in a sense shameful. Take away sexual attraction and women are extremely ugly from a purely aesthetic point of view, generally stupid and not very funny or amusing. Bronze age pervert had an excellent meme on this – https://bloodyshovel.files.wordpress.com/2018/08/e5b18fe5b995e688aae59bbe-2018-08-27-01-47-18.png?w=1024 – once you add pre-modern hygiene and grooming, it becomes extremely demeaning for a man of higher intelligence to be wired to be attracted these creatures.
Most intelligent men overcome this by seeing the benefits as overriding the ridiculousness of sexual attraction, but I can imagine that for men with ultra-elite aesthetics and intellect the irrationality of their sexual desire must have been intolerable and something they wanted to ignore.
Gay nonsense, in my humble opinion.
Women are pretty.
Not sure if trolling, but as long as people on the internet don’t think you’re gay.
I suggest that the reason you find them ‘pretty’ has everything to do with their ability to bear you children and nothing to do with aesthetics.
This:
https://upload.wikimedia.org/wikipedia/commons/thumb/9/9a/Arno_Breker_Der_Sieger_%281939%29.jpg/583px-Arno_Breker_Der_Sieger_%281939%29.jpg
is aesthetically more beautiful than this:
https://upload.wikimedia.org/wikipedia/commons/thumb/9/92/Arno_Breker_Eos_%281939%29.jpg/582px-Arno_Breker_Eos_%281939%29.jpg
Lust has very little to do with pure aesthetics.
Once you add in female behavior it’s easy to see why ultra high-IQ, aesthetically-gifted men might hate their libido.
Well of course marble, being cold hard stone, lends itself better to representing the masculine.
But I’ll take this over this any day.
Women are beautiful, women are nice. Their bodies are soft but elastic, so a gracefully posed women is posed in a way that shows her superior flexibility, as a well posed man is posed in a way that shows his superior strength.
The softness of a woman is displayed in gymnastics and in dance, and it is beautiful.
If you cannot see the beauty of women, there is something wrong. We like to look at women in part because we are men, but in part for the same reasons as people like to look at cats. Women are beautiful as cats are beautiful, men as horses are beautiful.
Even a female gymnast is only about a tenth as graceful as an average cat. I really doubt we would pay much attention to them at all if our brains weren’t wired to detect a fertile women from hundreds of metres away even in our peripheral vision.
If they have any aesthetic value at all, it is extremely difficult for a heterosexual male to accurately evaluate without our sexual impulses clouding our judgement.
In paintings and statues, where their sexual value is somewhat removed, I think their softness makes them look formless and often quite ugly.
Gymnasts are about as graceful as the average cat. The average women is less graceful than the average cat, but is still rather nice.
We are arguing about subjective and personal interpretations of ambiguous and emotional words, such as aesthetics and grace. I am not seeing how this leads us toward either greater truth or sound policy.
I don’t consider cats to be particularly graceful. To me that word implies making something very difficult look very easy, so an Olympic gymnast and an Olympic weightlifter both execute with grace. Cats may be able to pull off physical feats that would be very difficult for a human, but such a definition would make the whole argument circular, with human grace being the reference point.
Can you show that there are objective criteria for a male aesthetic, that are intuitively and consistently understood by normal heterosexual men, and not determined by the sexual valuations of women (and increasingly, homos)? I rather doubt it, considering that Eugen Sandow and Ronnie Coleman were both deemed to have the ideal masculine physique just a century or so apart, and could hardly look more different from each other. We’ve also cycled through eras when pale skin was favored and other eras when tanned skin was favored – essentially, elite aesthetic vs. peasant aesthetic. This is all far more subjective than you make it out to be.
If enforcing a categorical distinction between aesthetics and sexuality leads to untenable conclusions, such as:
This cracked me up. Do you realize you literally took this image from a Spandrell post (The BAP Trap) in which he strongly implied that BAP is homosexual propaganda? You literally pulled this “excellent meme” from the middle of an explanation of why these memes are dangerously subversive.
Maybe you did it unintentionally, through a Google image search or something, but I still find it very funny. For anyone who wants a comprehensive takedown, just click the link above.
I haven’t read the spandrell post. How does he refute the claim that sexual desire is not primarily determined by aesthetics? Or are you presuming that liking one meme implies an endorsement of everything else the meme-creator believes?
Without a direct argument I will continue to believe the meme is excellent, as is the Schopenhauer quote (is Schopenhauer gay propaganda too?)
We seem to be running into Jim’s signalling problem here. I give an explanation of why there is a strong correlation between genius and celibacy and am immediately under suspicion of having sex with men.
Straight men should not have to think of homosexuality at all. Maybe once every 3 years or so at most, but no more.
He doesn’t, because he wasn’t doing a rational takedown of BAP, he was explaining how and why homosexuals create subversive memes.
I’ll refute the claim by pointing out that it’s an unfalsifiable claim, and almost indistinguishable from the claim that sexual orientation is different from biological sex. “Biological sex doesn’t determine attraction” sounds memetically identical to “biological sex doesn’t determine beauty standard”.
The claim is that aesthetics and attraction are different categories, whereas the claim should be that men and women are different categories. Men have more varied sexual preferences than women, so society tends to converge on a single ideal male aesthetic, whereas the ideal female aesthetic is more vague. This doesn’t prove to me that one is objectively better, only that they’re measured in different ways.
The strange look of the female statue you posted is, in my opinion, primarily because it is set up to emphasize masculinity: contrapposto stance, short hair, A-cup and hands raised in a way that de-emphasizes the breasts. Whereas the male statue represents about 10-12% body fat. It’s a comparison of a very average-looking woman to the top 5-10% of men. Alf’s comparison makes much more sense, it’s looking at the high end of both sexes, with both photos set up to emphasize the positive qualities of that sex.
That didn’t happen. I pointed out, truthfully, that your BAP material came from a post about BAP’s subversively homosexual agenda, without implying anything about you, in fact going out of my way to point out that you probably didn’t realize it.
You should read Spandrell’s post; it’s about homosexuals trying to subvert normal men with this kind of stuff in the same way that lesbians try to subvert normal women with feminism.
Nobody tell this guy what the English translation of “Für Elise” is.
Or that JS Bach had 20 children, 7 from his first wife and 13 with his second after his first died.
What argument do you think you’re refuting here?
Preumably that Beethoven’s celibacy wasn’t self-imposed, because he wasn’t banging Elise.
There’s a strong correlation between genius and celibacy. I don’t think I or the OP implied that it’s a perfect correlation.
And we’ve explained why causation runs in the direction opposite of what’s implied.
We can readily observe the serious communication difficulties that occur over a 30-50 point IQ gap. It is constant, pervasive, and impossible to miss. However, I am not aware of a single genius who led a mediocre life until after being denied sexual access to women, and subsequently went on to create great works.
“I can’t imagine X having done Y if he’d been banging women” is Argument from Incredulity. You’ve highlighted a correlation, and we agree that there’s correlation, but don’t agree on the cause. If you want to show cause, then that requires a higher standard of evidence; you need to show instances where forced involuntary celibacy can be shown to have induced works of genius, and also explain why the “IQ gap” is not important, and why the majority of high-IQ incels do not have genius accomplishments.
Just to be clear, I am arguing that genius causes self-imposed celibacy.
The OP argued that celibacy causes genius.
The decline of traditional marriage may have much more biological reasons:
Biologically, marriage and the nuclear family are mate guarding behaviour.
Humans engage in it because:
1.
Paternity certainty: MEN don’t want to invest in other men’s children, only in their own.
So they keep their wife close, and set up legal/moral systems that make adultery illegal, costly, even deadly.
2.
Investment and protection certainty: WOMEN fear abandonment by the man, who could just walk away, leaving her to provide for children on her own, with at least less-than-optimal results.
Marriage and nuclear family served both sexes’ reproductive needs – love and religion may have not been relevant motivators.
Marriage and nuclear family are declining today, for decades, and the trend seems still growing.
Why might this be?
I argue that fundamental drivers are science, technology and wealth:
1.
Paternity certainty today and in the future can be guaranteed by DNA-based paternity tests.
Instincts aside, this does not require any male mate guarding to prevent misinvestment in other men’s genetic offspring.
Men are therefore less inclined to marry, to stay close to, guard and shield a/”his” woman from other men.
The evolutionary novel DNA-testing technology makes his mate-guarding behavior, marriage, obsolete.
2.
Women no longer need the loyal protection and investment from any single man, because the social welfare systems take care of her needs and those of her children; actually often better than the lower-quality part of men can. She does not need to be loyal to any single man, not need to try to keep him close or please him anymore.
Because a man, beyond sex, is only necessary for protection and providing resources to women, and because the state, in form of welfare and the legal, police etc. apparatus is more reliably and powerfully providing those needs to her, mate guarding and marriage have no longer a solid foundation in women’s needs.
Child support laws, in combination with the certainty of DNA-based paternity tests, also make sure the father of her child must provide resources, even if she does not longer tolerates him being around.
Therefore, I think the underlying biological incentives for marriage may have been abolished and this being the actual reasons for the emergence and growth of divorce, single mother-ship, and patchwork families.
If this view is correct, then those trends will only accelerate, until they are the new norm, marriage becoming a sentimentally loaded circus ceremony, an obsolete custom.
I also have some objections to your ideas that women should “obey and honor” their husband.
God as the supreme alpha-male may make this possible, but religious sentiments seem to become more and more a laughing stock – science and technology have embarrassed religious doctrine, it’s not priests and gods that deliver magic, but science and technology. More and more people abandon religion.
To make your system work, you needed some way to reintroduce wide-spread respect for religion, which I doubt you can do, because you lack the required power.
Further, women’s hypergamy is not blind, and every woman knows that the best 0,01% of men are vastly superior to the rest of men; forcing women to really invest/respect/obey a husband she knows is an inferior male seems impossible to me.
“Game” has limits, no level of pretending can make a superior man out of a clearly inferior one, which are the vast majority of men. You cannot blind women to the truth.
I wonder if you are really only worrying for the future of civilization and white people, or if you may actually be just consciously or unconsciously biased to psychologically rationalize a social system into existence that calms your evolved fears of male sexual reproductive failure: Female and male reproductive optimal strategies are in conflict, actually in an existential war;
the sexual selection heuristic women use to determine superior men may very well be suboptimal, but selecting for the most successful, aggressive and dominant males has at least brought us this far. Women may all share common attraction to criminal and dumb brutes of men, just like men all share a common attraction to sexy, young, fertile and dumb young women,
but there is ample evidence that many women select fathers of their children by their objective merits – wealth, career, health, social status, IQ etc. – in natural conception as well as by artificial one aided by sperm banks.
This may be the actual future of human reproduction, physical sex becoming a mere entertainment procedure.
It seems true that most men, from the perspective of women’s hypergamy, as well as objective eugenic reasoning, deserve to go extinct – it seems to me that your idea, socio-legally enforced exclusive male-female binding in marriage is actually dysgenic, because it propagates vastly inferior male genetic lines.
Isn’t it true that we could greatly improve mankind’s genetic quality by exterminating the, say, lowest 50% of women and lowest 99% of men in terms of genetic quality? We could get rid of sub-130 IQs, ugliness, low health etc. just by NOT enforcing marriage and making DNA-testing and sperm as well as egg selection cheaply available – which, probably, will happen anyway. The Chinese, for example, have less qualms about such a, from current Western perspective, ruthless reproductive scheme – they are all about competitive results.
Apparently the idea that children “need a father” is mostly a myth, much like feminist theories of female equality – both myths being dissipated by motivated/biased parties, people that want something to be true, because it serves their wishes.
Young children do not automatically profit from having a father around;
older children, especially boys, need male role models and instructors, but those they can find in the wider society, not necessarily in the form of a live-in father.
A lot of evidence suggests that actually orphans, as well as single-parent-raised children, have no worse life outcomes than those raised by nuclear families – if enough resources – that is money – is available (which today and in the future may be automatically, because of the welfare system). There is even evidence that, in the lower social strata (ghetto blacks, junkies and that ilk) children develop BETTER if the father is absent.
But I am open to your proposed system, and I see good reason for it – it makes sense for me, and I would at least wish to try out for a few centuries to see how it fares – but I cannot ignore the elephant in the room: I just cannot see any way you could implement it in society, because you lack the power, and it would be interpreted by most people as being coercive and backwards, being met with fierce resistance from many/most people. You needed a kind of dictatorship, at least in the beginning, and that seems just illusory.
Nuts:
Listen to the men’s rights movement, the PUA movement, and the Men Going There Own Way movement. Read Dalrock talking about Duluth.
Marriage has been abolished, fatherhood has been criminalized. Men who love their children and their wives are punished in ways that we would never tolerate for punishment of a serial killer. Every video demonizes husbands, fathers and fatherhood all the time every day.
This is not wealth and technology.
If we look at exogenous shocks caused by war and economic crisis, there is no effect on fertility, as for example the world wars and the great depression.
If we look at exogenous shocks caused by political violence, as when General McArthur emancipated Japanese women, huge and sudden effect on fertility.
Further, we see some very poor countries with low fertility, and some very poor countries with high fertility, and the difference is always female emancipation.
War and Peace, boom and bust, no effect on fertility. Therefore, wealth and technology is unlikely to effect fertility.
Cultural and religious change, huge, dramatic, and sudden effect on fertility.
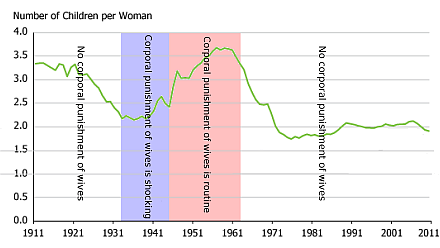
Was wealth and technology declining from 1941 to 1961?
[I posted this before, but the comment seems to been have lost somehow]
“Women are totally unaware of what they actually want and even if they are generally cannot be honest about what they wan.”
I think it works like this:
Women are highly confused by their own desires, because they are fundamentally in conflict:
They want a sexually pre-selected (by other women, mate copying) man, who is better than all other men and commands all other men; a man so superior he can havy any woman, so superior he doesn’t care for her at all and treats her arrogantly and like exchangeable cattle;
AND they want that man to only love HER ALONE, to do their bidding, to become their personal protector, provider and slave through love-based infatuation; but when the man actually is/becomes like that, women’s instincts suddenly make them feel disgust towards him,
because if she can get him that easily as a love slave, isn’t she much better than him and could get an even better man?
Women’s sexual programming, therefore, is in eternal self-conflict: They never can have what they want, because if they get it, they don’t want it anymore.
Sexual attraction and love/protector/provider function of a male are always opposed functions in their desire programming, therefore women are never completely satisfied in sexual-love-related matters.
They are actually unfortunate beings, impossible to find lasting satisfaction, they always have a nagging emotional sub-process that makes them unhappy, doubting their current socio-sexual setup, whatever it may be.
They want to have the super man; once they have him locked down, they suddenly don’t really want him anymore. This also explains female dissatisfaction with marriage, and the typical loss of self-care (getting fat, sloppy) of women – once married, they stop feeling
sexual attraction to the husband, don’t care to look attractive to him, anymore, because they have him securely lock down as her “sexual property”. As is often the case with humans generally, women only want what they can’t have, and grow bored, even disgusted, with what they have.
I also think I may have understood why women are incapable, perhaps only unwilling (if they have some better understanding of their own motivational system), to tell men what they really want:
And I came to grasp it, because I have a bit of a rape fetish: I cannot pay a woman to get raped, or ask a woman to pretend to get raped, because it would not be a real rape – she would be “accepting the rape”, which isn’t real rape – she has to be completely unwilling
and rejecting it, to be rewarding to me, I have to overcome her absolute resistance to it.
Analoguously, women cannot simply tell men what they want, because if they did, the male behaviour would not be real – it would only be pretended, therefore not activating women’s reward center – they’d know the man only pretends to be the superior, dominant apex killer leader of
men brute, not being a real one – they MUST wait until a real one comes along/men figure it out themselves, otherwise they cannot feel reward from it.
As far as I understand it, game is functionally to men what makeup/pushup bras etc. is for women – a technology that pretends a higher sexual market value based on the instinctual sexual quality cues for either sex: And because sexual arousal in women, much unlike men’s, depends
on behavioural cues of the man, men show dissimulated behavior (other typical male fake sexual signals concern wealth – fake rolex, suit, stories, debt-financed mating displays – and power – telling lies about how great he is and which powerful other people he knows personally
and what successed he has had and what he can do etc.).
One problem with game is that it can greatly help get a man around the sexual inhabitions of women initially, but in the long run it must become obvious that he is a only a pretender: Then the women feels (rightly, probably) cheated. Just like with women, when the makeup
comes off and she is seen naked without beauty aid fakery by a man who then feels disapponted (“morning-after-effects”), women come to realize that a guy is not actually the true “alpha” he pretended to be.
Getting initially around sexual inhibitions of women is one problem; and game helps solve it. But really being superior is a much bigger problem, and game doesn’t do much for it. In the past, game probably advanced reproductive success, because any sex, absent contraception/abortion,
could lead to successful reproduction; not so today. The real problem is actually being superior, being really successful, having really the resources to rear children, to really provide for them – because rearing a child costs hundreds of thousands of dollars,
and takes time and energy, that being the real obstacle, the real fitness test.
“Most men at some point want children, though I would somewhat agree that I don’t think most men want the kind of large families”
Male reproductive success does not require having big families – men’s instincts make them want to have many offspring (motivated by having sex with many women), but families are very expensive, having many offspring is not necessarily so:
By adultery with other men’s wives, men can have big “virtual families” without paying a price. At least it was so in the past, and therefore most men are instinctually well prepared to exploit such chances, if they present themselves.
Men are made to get many offspring – but not necessarily to pay for them (other men can and, from the perspective of the adulterer, should do it).
Is this bad? Difficult to tell: It’s bad for the reproductive interest of the cucked males. But is the net effect on humanity, that is, humanity’s genetic quality, also bad?
Successful adultery may allow superior men to spread their genes more effectively, improving average human quality. You yourself could be, probably are, alive today, because one or more of your ancestors successfully cheated and cucked lower-quality
males, exploited their provider functions to rear another, superior man’s offspring, exterminating their own genetic lineage doing so.
How much of current human genetic quality is due to eugenic effects of our ancestors cheating, cucking, committing adultery – or even outright murdering other men? You are probably alive today, because some of your ancestors just murdered their sexual competition – in
open fights, by poisoning, knife in the dark, whatever it may have been. Would you rather not exist today, because you think their behavior was “bad”?
Life is actually open or secret warfare for resources and reproduction; the truth of the matter is that EVERYTHING is allowed that is successful.
There is only war – this appears to be the supreme law of the universe.
That some pretend it to be otherwise probably is just a disinformation campaign to lull others into a false sense of security, to ensalve and exterminate them all the easier.
“Civilization depends on making women do as they should and not worrying about what they want. Tribes and civilizations that worried about what women wanted in ancient times got conquered, since we’ve started worrying about it we’re far along the path towards getting conquered.”
This was so in the past, but this may not be so anymore, because the environment, the rules, the incentives, have changed (DNA-paternity-testing, welfare systems, …).
Brutally abolishing all social welfare, punishing people with 30-years imprisonment or even death sentences for using contraception/abortion, and forbidding women to work and getting educated would probably have fertility rates explode, but is incompatible with democracy;
it would require a dictatorship, which is see no way to being created.
If we cannot force them, we must trick them.
If we cannot trick them, we must obey them, or we exterminate ourselves.
If we cannot force or trick them, women hold the power.
And women want the provision from all men (due to socialist policies, social welfare), but only want to mate with the best of the best of men, directly or by sperm donation/sperm banks.
So, it’s socially/democratically an alliance of women and superior men (the latter typically also holding political and economic power, expanding their influence) vs. lower-quality men. Probably many lower-quality men would betray their fellow lower-quality men and enter into the women’s camp,
in hopes of getting some sex as a reward (White Knights, if I am correct in the lingo); then there are MGTOWs, video gaming adult men etc., who have basically given up and will not offer much support for their fellow low-quality men.
This looks like a mighty majority in votes and power for the women/superior men side of the struggle, who then should win and have their interests made into law.
Would this really be bad? It should improve average human genetic quality, by exterminating current low-quality men (who would die out rather comfortably with porn, perhaps sex robots, electronic entertainment, fast food etc.).
Fertility rates may stay around one or two children per woman, but it seems we can exploit immigration for lack of workers and military. This proved, indeed, catastrophically in the past (Roman Empire, etc.), but political, psychologial, military, propaganda, surveillance etc.
technology of those times were vastly inferior to our’s – then, a soldier and his sword were a unit of power; this is not longer the case. Real military and political power does not longer lie mostly in numbers; quality has greatly exceeded quantity in the effective power balance.
Brzezinski said that “in earlier times, it was easier to control a million people, literally, than physically to kill a million people” while “today it is infinitely easier to kill a million people than to control a million people.”
But control technologies have also improved vastly – I think we are at the dawn of both being able to control and kill people with unprecedented capability. If we really wanted, we could kill off all non-whites, besides perhaps the Chinese, without risking our own lives doing it;
our modern weapons, incl. B/C- and the occasional A-weapon, make this possible. We cannot conquer and hold a primitive country like Afghanistan, but we sure as hell could just exterminate it completely without risking a single soldier’s life of our own.
It’s only politically impossible, not militarily.
Electronic surveillance and reward dissipation and mind control becomes ever more refined and powerful; think about what Google or Facebook are doing, and how they make those unprecedented amounts of huge profits. Mind control works. Just look at the boys who try to attack or even
kill their parents for forbidding them video games; or the girls attempting the same for having their social media use restricted.
Dumbing down and instilling false beliefs also have become powerful tools for mass control, that are already highly effective, but keep improving at fast pace.
I think the future will likely be a small cognitive, that is, genetic elite, that has unprecedented control over most other people, while the latter will not even notice being manipulated, or, if they do, rather like it, because it feels good, is comfortable.
I think the real, if perhaps widely unnoticed, struggle is not between women and men, but between those who want access to top genes for their own offspring, and those who want to prevent top genes to be available to others, because their own superiority, power, wealth,
comfort, social status – all depend ultimately on their genetic superiority.
The elites are elites because they have a monopoly on quality genes.
Everybody else (who is aware of what is at stake) wants those genes, but the current elites want to prevent others having access to them, because it would end their elite status, bring more competitive pressures on their own children/families.
Genes, genetic quality, are the ultimate power.
Think about if in that conflict, everything else being brought forward perhaps is being just a deliberate distraction from the real conflict.
Above I argue that marriage is obsolete because for both sexes the underlying motivation for marriage – mate guarding – has become irrelevant, due to the evolutionary novel tech of DNA paternity testing and enforced child support from assured fatherhood (also by DNA testing) and social welfare.
Those changes in the environment are recent: DNA testing is novel (only about 30 years old), our social welfare systems expanded also only in the last decades.
Therefore, men and women need each other less, and are freer to follow their true desires.
The fertility crisis, in my opinion, is caused by the fact that people crave not so much having children, but having sex.
Before the advent of cheap and reliable contraception and abortion, people had sex and had to “suffer” getting children mostly as a natural side effect. The fertility crisis matches temporally very well with contraception tech, especially the hormonal one that became available about 40 years ago.
People want and have sex, not so much children. Those are seen as a costly inconvenience.
In our ancestral environment, having any kind of sex meant children – rape, cheating, faking love, feeling real love, horniness – because there was no contraception.
If a woman became pregnant and gave birth, it was both publicly visible, and legally and socially impossible to just kill the newborn (OK, some women did so and still do, but it’s not common). And then parental, especially motherly, instincts suddenly kicked in, and the baby was being cared for.
Evidence: People crave porn, Tinder, romance novels, and – they have sex, almost all public entertainment activities like discos, cinema, restaurants, visiting bars serve as initiators for sex, and then they have sex, weekends for example are, if you had god’s eye from above, orgy time.
Imagine you had people eating – clearly evolutionary beneficial – and then vomiting it all out in the toilet. Complete waste of eating effort in terms of nutrient absorption, only the pleasure of eating food was experienced.
The same happens with today’s sex: People execute their evolved reproduction behavioral programming, and then throw their efforts’ result in the gutters, in the toilet, or have them cut out by a doctor: People love sex, but hate babies (and the work and stress and cost they bring, but, again due to genetic instinct programming, much less so when they suddenly actually have their baby).
I argue that, without contraceptives and abortion, the fertility rate would be much higher, because just like most people can’t help eating themselves into obesity, most people can’t help but must have sex and would then have to endure the result in form of babies.
I further argue those pressures on men were especially great before the advent of ubiquitous internet porn.
And I argue that men were only driven to marry not because they wanted a family and children, but because in most societies in the past, marriage was the only promising way for a man to get sex.
Lack of good alternatives to resolve horniness and lack of abortion and contraception were the main drivers of both marriage and fertility.
Also, your cultural explanations always lack the Coolidge Effect, the fact that both men and women (perhaps more so in men) experience a cooldown in love and sexual desire for each other after a few days/months/years, that slowly but surely turns first into indifference, and then mutual disgust.
This ensures genetic variety, because new and different sex partners are sought out, and this trait proved superior in producing fitter offspring, on average, than monogamy.
We today can even measure it: Love is a temporary idealization, which works by shutting down brain regions for critical thinking about the loved one – you can see it in fMRT, people in love have brain regions literally “shut down” when looking at their loved partner and being asked judging his/her quality; after a couple of months, exactly at the time when love ends and with it most of special sexual desire for that person, in the same test the same subjects have suddenly their brains working again like they did before being in love, as evidenced by their brain areas lighting up again in fMRT; and, behold, they not only light up again, suddenly they are again able to critically objectively assess their partner, suddenly seeing much more flaws and imperfections in him/her.
This proves that we are basically biologically programmed to never marry for life/to divorce/to be promiscuous.
For almost all people, enforced marriage only forces two people who have begun to hate each other to live together until they die.
Marriage is very nearly always a great disappointment – it starts out great and promising, and soon becomes disappointment and suffering and mutual disgust at each other.
Some say marriage is for rearing children, but I question if two people who have begun to hate each other being forced to live with each other produces a good environment for this undertaking.
” Every video demonizes husbands, fathers and fatherhood all the time every day.”
Perhaps because this sells because it accurately depicts female opinions toward most men?
We know women are hypergamous; and we know that 99,9% or so of men are objectively, truly inferior to the genetic quality top men;
wouldn’t it be ABSOLUTELY CORRECT to state that the real, private (or today not so private) opinion of most women towards most men is that they think they are pathetic, defective clowns, genetic garbage, rightly and justly being made fun off, being humiliated?
In terms of media images, we have two very different sex ideals:
Women are shown as sexy fertility goddesses, because that is the male’s fantasy ideal.
This is TRUE, because most women, if young, are really as attractive to men as shown by the media. Men find their media-set expectations fulfilled – there REALLY are millions of sexy fertility goddesses out there.
Men are shown in media as supermen, muscular warrior-princes, billionaire Nobel laureates that secretly fight crime at night, heavily pre-selected by other women (mate copying), because that’s the female’s fantasy ideal.
This is FALSE, because practically zero men exist that are as attractive to women as those shown by the media. Women find their media-set expectations totally disappointed, there are NONE supermanprincekingnobellaureatewarriorkingbillionaires out there – compared to their media-set expectations, real men are pathetic losers.
If it were the same setting from the POV of men, then all real women would be obese and 60+ – a constant disappointment.
I think that men and women hate each other more than they like each other.
Men really value a well-shaped sex toy, and women really value a dangerous, deadly killer tank that is feared by all other men and who also is a limitless ATM.
Ask:
When freed from all social and other restraints, what do men and women want? Marriage?
No – men want a huge personal harem, that is, enslave women;
and woman want the top killer as their love addict who only serves her and allows her to execute physical power through him – enslaving him personally – but also often want to be loved and desired by all lesser men, who are to serve her as willing slaves, too.
The whole cultural and media ideal of love and marriage is a lie, based on a short-timed idealization illusion from having evolved programming shutting people’s brain parts off temporally.
Real love is a killing, an extermination mechanism, because the inferior human life is not loved.
Correction:
“The whole cultural and media ideal of love and marriage is a lie, based on a short-timed idealization illusion from having evolved programming shutting people’s brain parts off TEMPORARY.”
Sorry, it’s 3AM here and I’m tired.
Most men at some point want children, though I would somewhat agree that I don’t think most men want the kind of large families Jim wants (for the elite at least).
Women are totally unaware of what they actually want and even if they are generally cannot be honest about what they wan.
Most men are having far less sex then they used to, most women are having at least somewhat less sex then they used to. Defect/defect equilibrium and modern feminism are ergo not sex positive but even this is beside the point.
Civilization depends on making women do as they should and not worrying about what they want. Tribes and civilizations that worried about what women wanted in ancient times got conquered, since we’ve started worrying about it we’re far along the path towards getting conquered.
The role of contraception in the collapse of fertility is hugely exaggerated. We have had the condom since the late bronze age, the sponge since the early iron age.
What does make a difference is not education programs about contraception, but education programs that demonize marriage, demonize the female role, demonize men, and promote the murder of babies, while making a slight and superficial pretense to be about contraception.
By and large, any social factor that causes more sex causes more children, and any social factor that causes less children causes less sex.
If you have a baby, observe the reaction of every post fertile age woman in the vicinity. Woman want babies, but they are told they don’t want babies and believe what they are told.
Completely agree and did not mention contraception.
Looks like it was a reply to me, down farther below. Although I wasn’t specifically referring to contraception either, simply pointing out the obvious crack in our new WOTposter’s foundation, which was centered around the premise that non-reproductive sex is replacing reproductive sex, which is not true, unless you count homosex, which even with their hair-raising promiscuity is probably still insufficient to offset the decline in reproductive sex.
Women, in particular, are easy to confuse with propaganda. If women are given a choice to defer or avoid childbirth, and the propaganda tells them to defer or avoid childbirth, then many of them will defer or avoid childbirth. Technology really doesn’t play into it.
My propaganda towards women would focus on a few key points.
1. That they are worthless without a man and their value is in serving their husband or the other men in their life (children will follow naturally from this).
2. That loyalty and doing whatever you said you were going to do is the highest good (female lying flaking etc and treating their word as a statement of current feelings rather then a promise they must fufill is to me their most intolerable trait).
3. Don’t trust or listen to other women (its the female hivemind that corrupts women and it will take the Western female hivemind a long time to recover… hence we want to socially isolate women from other women as much as possible).
Abortions can have a huge impact on fertility numbers.
In China and Russia, for example, women get them as easily as hamburgers.
http://www.numberofabortions.com/
http://www.johnstonsarchive.net/policy/abortion/worldabdemogr.gif
http://www.johnstonsarchive.net/policy/abortion/usabig05.gif
http://i.imgur.com/fToFLTR.gif
The country-dependent picture may be warped, because if abortion is uncommon/illegal in one country,
many women may just book an “abortion vacation” in a country where it’s allowed.
“What does make a difference is not education programs about contraception, but education programs that demonize marriage, demonize the female role, demonize men, and promote the murder of babies, while making a slight and superficial pretense to be about contraception.”
Yes, propaganda and example setting is a powerful tool. But it’s a tool of those in power, and if you have no power, it’s not a tool you can use.
“By and large, any social factor that causes more sex causes more children”
No, I cannot agree.
People have a lot of sex, and taking great care not to get babies.
What you describe is the situation before simple, cheap,reliable and comfortable contraception technology.
This is just not longer the reality.
People want sex much more intensely than they want children.
Our evolved programming makes us crave sex, not children, to reproduce. This was effectively causally coupled in our ancestral environment to reproduce, but is not anymore since a few decades ago.
“If you have a baby, observe the reaction of every post fertile age woman in the vicinity. Woman want babies”
Yes, women want babies.
But they also want other things as much, like being slim and beautiful, which many/most fail ever achieving;
they want beautiful clothes, which many cannot afford;
they want superman to be their lover and kids’ daddy, but don’t ever find/keep him.
If women really, powerfully, wanted JUST babies, they could have one easily in nine months time;
but they want other things first/more, which they cannot get.
There is no superman for every woman, there is no way every woman can be rich, upper class, living in a castle or mansion.
But most women seem motivated to wait for it to arrive with superman; so they only waste their fertile years.
What then makes them pregnant is the late realization and disappointment that superman and the castle will not materialize, but their
fertile time runs out, so they then concede to allow some compromise-disappointment of their hopes of a man to impregnate them.
Which ruins the fertility rate, because if they had realized this disappointing reality sooner, they would have wasted less fertile years,
and could have had more children.
A reaction of envy?
ADDENDUM
“If we look at exogenous shocks caused by political violence, as when General McArthur emancipated Japanese women, huge and sudden effect on fertility.”
I always wondered that of all nations Germany and Japan have the lowest fertility rates post WW2.
Both nations were the primary losers of the last great war;
I wonder if having their men defeated by “better men” is on some psychological level to woman comparable to having their men becoming disabled/weak/poor/unemployed – strong predictors of separation/divorce/loss of respect and love from women for their men?
Would it feel to women that their men are losers, genetically inferior men that have been defeated/enslaved by “the other tribe”, by better men? And that they would waste their precious eggs by reproducing with the losers?
When Germany conquered France/Paris, there were quickly sexual relationships started by the local women with the then-victorious German soldiers.
I just want to point out that fertility depression fits well into hypergamy theory, as a mechanism that discourages women to mate with inferior men.
And what “true desires” would those be? Women working 40 hours a week for slave wages and men going incel at staggering rates?
Oh, I see. So fertility is going down, but sex is going up. That would be a clever argument, were it not for the fact that sex is actually declining as well. Also, I presume you aren’t aware of studies showing that – for example – a woman is more likely to orgasm when a man strongly ejaculates inside her.
Look: biology – nature – isn’t so easy to hack. We’re programmed on a fundamental level to want to reproduce, physically, psychologically, spiritually. Orgasms are just one of many ways Gnon uses to incentivize us. Women go nuts when they’re nearing menopause and don’t have children yet. Populations that fail to breed are evolutionarily replaced by populations that successfully breed. With enough psyops you may be able to get men and women to think that they just want sex, or resources, or whatever, but it’s not the brain or the genitals that drive this process, it’s the DNA, and your DNA really really wants to survive longer than you do.
That is who we are: not the ephemeral product of Current Year ™ technology and economic policy that somehow just happens completely outside of our control, but a self-replicating species designed to demolish Malthusian limits using technology we invent and control, and colonize and conquer the stars, modeled in God’s own real or metaphorical image. Technological determinism is a retarded argument that denies agency to both humans and God. We might as well label it apostasy right here and now.
We all know, and restate often, that women would rather be violently raped by the 1% most brutish and violent men on the planet, but this is not consistent with what men want, not consistent with civilization, not consistent with cooperate-cooperate equilibrium and not consistent with Gnon’s will, because failing this shit test causes fertility to crater and barbarians to replace us. Thus, we do not accept this arrangement; not as the result of insane oligarchs, not as the result of oversupplied feral women, not as the result of technological accident, and not for any other reason.
Well put.
How do liberated women live? In Africa, they sleep in grass huts and till the soil in a gentle tropical climate. In the West, they vote themselves generous government handouts. What if both these options are off the table, but women are liberated anyway? Answer: Mass female infanticide.
A free woman is of no use to anyone. Not to her parents, not to her husband, and not to the children she’ll never have. If eighteen years from now your newborn daughter will be free to run off to the city, slut it up, and die childless, why let her live 18 hours? Try for a son, at least he’ll stick around and help out. This problem is not self-correcting, as a lopsided gender ratio only creates more opportunities for sluttery.
Conversely, a daughter that is bound to obey you is worth the expense of raising, because you can trade her for an obedient wife for one of your sons.
But… but… the Bible says babies must not be killed! Yes, and the Bible also says women must obey men. One rule doesn’t work without the other.
Western women aren’t that crass – they vote for government to create HR and give them useless jobs then use their utter lack of self-reflection (and lack of intellectual sophistication) to convince themselves that those jobs are needed and important – extending their massive self-regard to their jobs.
Useless make-work jobs are a form of government handout, all the more effective because they confer status as well as money.
Contraceptives have always existed, both herbal and just pulling your dick out, which I’m sorry to report is 100% effective. Technology has no causal power whatsoever, because men can outlaw technology. How many abortions in Taliban territory? Can Afghan girls go to a doctor and get birth control?
You’re right that there is a sex war, that men and women want very different things. Women want hypergamy and infertility. I do not care what women want very much, because when women get what they want, no babies are being made, and even worse, men cannot cooperate with each other, which will end civilization even if we can grow babies in vats.
If men did not evolve to be significantly stronger than women, we would have no fertility. It would seem optimal for survival if women were as strong as men and could participate in war and hunting, but if men cannot coerce women, no babies. So men evolved to be stronger than women because that provides maximal reproductive fitness.
Male coercion of women is part of human zoology, human mating behavior. Denying this fact is beating your primary weapon of reproduction into a plowshare.
Women do not want the most dominant male imaginable, or will fuck you if you pass an abstract threshold of attractiveness. Women cream their panties for the most dominant male present. If you culled 99% of men until the entire male population consisted of uberchads, one of those men would be getting laid like a pipe and 80% of them would be incel, which would be transparently obvious to you if you ever went to a college football party, where almost every man present is in the top 10% of alpha compared to men at large, but 80% of them still go home alone to beat off.
Everybody who argues that we need to allow female sexual liberation, and then massively restructure society around it in incredibly unintuitive ways that rely heavily on unproven and finicky technology which requires a high standard of societal wealth and male cooperation to maintain and operate, is highly suspect to me.
They claim to want the end goal of fertility and eugenic breeding that we do, but studiously ignore the tried and true historical method of just putting bitches in they place. I suspect it’s because female sexuality is sacred to them and they can’t imagine interfering with it.
One of the consequences of the blue pill tech nerd. Someone so enamored of technology because it fixes the way people are wrong, usually because they were weak and were bullied and view people as the weak link in technology. They look at people and human behavior as interferences and obstacles that they need to fix with gadgets and coding rather than social organization. It is a chillingly inhuman view of mankind and it needs to get stomped on, hard, by the Inquisition when we get that going.
Our tools are to serve mankind in our pursuit of God’s will, not that we should serve our tools.
“. It is a chillingly inhuman view of mankind and it needs to get stomped on, hard, by the Inquisition when we get that going.”
So you think you can force your ideas with violence on other people.
OK, this can work – IF you are stronger, if you have supreme power.
Which I don’t think you have or will ever have.
Explain to me how exactly you and the minority that thinks like you are EXACTLY going to make the rest of society according your wishes.
Where does your power to achieve that come from?
If you cannot explain this in detail, I consider your intentions impotent power fantasies.
Ideas are more powerful than guns. We have better ideas, and so we will control the guns. The elite is collapsing from defection, and cooperation is adaptive in such a situation. Their coercion is collapsing in on themselves, and we will replace them, and our coercion will replace theirs, and we will be eugenic where they are dysgenic. The idea of a progressive complaining about using violence to alter behavior as if it doesn’t work is laughable. Of course it works. Culture is downstream of power.
Also, are you a fucking idiot? Please tell me EXACTLY your plan to fight us? What, are you a damned retard, that you think we would tell you if we had such a plan? Not that you could even understand, because crimestop would activate and you would just be mystified. We dont help our enemies, and we dont waste time teaching people who cannot learn.
Historical. People have always reiterated the beliefs of those in power and pro-natal views win in the end because death cults kill all their members.
That said ‘people are the weak link and technology will fix it’ is probably going to win in the long run. Flash cloning and memory downloads basically let you do away with the need for any other humans, but even if those are impossible, other technologies can upend the reproductive loop in ways that rapidly accelerate mass murder.
Hundreds of trolls before you have failed to promote this exact argument (“you can’t achieve this because powerful people won’t let you”) and, no doubt, hundreds of trolls after you will continue to try.
The existing power structure will collapse from a combination of infighting, low fertility/dysgenic fertility, defection, and running out of other people’s money. At that point there will be a power vacuum, and our hope is that a Pinochet or Franco or Putin will come along to restore order, and he will be in search of a priesthood that will maintain said order, which will be us, or people who think like us – does not literally need to be us. However, we are well aware that we could end up with a Stalin or Mao instead, which would be unfortunate, but largely out of our control anyway.
Reaction isn’t revolution. We don’t intend the illegitimate use of force to impose our ideas, we intend for a legitimate post-progressive ruler to realize our ideas are superior, because they are superior, and he will impose them by force if necessary, which probably won’t be all that necessary because at that point his subjects will literally be begging him to restore order.
There are certain anti-social grotesqueries of human nature we probably should edit away.
“Women cream their panties for the most dominant male present”
No, for the most dominant male they know of, and if that knowledge comes out of screens, they will consciously or unconsciously compare locally available men with that image.
I explained it above.
“So men evolved to be stronger than women because that provides maximal reproductive fitness.”
Yes, women are weaker because it makes them more rapeable, activates a cuteness and care-for instinct in men.
But if you try to simply rape women today, which you are perfectly able to do,
it will NOT lead to reproductive success, but to imprisonment and abortion.
Why? Because you lack power, you are too weak to force your ideas on society.
Actually, what I said is not absolutely true:
You actually COULD successfully reproduce with rape even today,
but it would take much more effort than the mere rape:
You needed to abduct a woman, rape and impregnate her, hide her away from society (remote cellar or sth. like that), have her giving birth, and then set her free.
You would still go to prison, sabotaging your further reproductive success,
but you had an alive baby child of yours that could not legally get killed anymore.
If you expand this idea, with enough money and effort, you could expand this scheme to hundreds of women, abduct them all en masse, keep them pregnant in a remote facility, and later set them free with their/your babies.
You would end up with life imprisonment, but could have a, for today`s standards, huge number of offspring.
Still, that needs a lot of competence/resources to pull off, in other words, great personal power, which most men are unlikely to have.
People succed in reproducing by rape all the time.
Women head off into situations where they are likely to be raped, get impregnated, bear the child on welfare.
Women show a marked prefence for children of men they perceive as manly and sexually successful, and conversely are apt to mistreat and neglect the children of the husband they have left.
I am not sure this qualifies as pure rape – women after all seek out those situations and refrain from morning-after pill or abortion.
I would rather call that desire to get inseminated by dominant males.
I also wonder if we oversimplify by not allowing in our model for different types of women; their reward system may be structure identically, but there are dumber and smarter women, like there are dumber and smarter men (though the spreadspectrum is wider in men). There are men who not just want to reproduce with any hot young woman they can get, but put great importance on selecting one from good family stock, with good IQ and other qualities – there are many men today who even look down on tattoos and piercings, even if the girls is otherwise very sexy, and use her only for sex, but would never have a child with such a girl.
Such woman also exist – they may enjoy toyboys for sexual pleasure, but would never have a child with one, if necessary would rather use IVF or sperm banks to score, say, a Nobel laureate’s sperm and rise the child alone.
This appears mostly being a class things – the higher social class, the more likely people consciously, not just emotionally, act eugenically., because they are more conscious of where their advantage actually comes from.
In terms of child neglect, and even infanticide, we have a clear picture of that from evopsych:
Women kill their children for three reasons:
1. Malformations
2. Food scarcity
Both are obviously evolutionary adaptive – it prevents wasted investment in a child that cannot likely ever succeed in producing offspring themselves.
3. This case is more interesting, less obvious, and less generally known:
Women kill their children when they suddenly have access to a higher status male;
for example a village girl having a child with a farmhand, when suddenly the mayor’s son shows interest in her; instinctively women seem to know that her child is a hindrance for securing impregnation and protection/investment/marriage from the higher-status man, and kill their baby – which, moral or not, actually enhances her fitness, because while the 1st child is lost, the likely reproductive success from the child of the superior man is significantly higher (more resources, status, protection, life chances, and better genes).
Apparently this mode of infanticide is a major, if not the major, cause of it today.
I just happened on a possible timely example:
https://archive.is/bjSWO
The desire of women to wield the power/right to abortions may be understood in the same light:
Women want to keep their options open, want to keep being able to kill a child from a man that, after some time, turned out to be less “alpha”, less of a superior man, than she first thought when she had sex with him. Abortion may be for woman like a mistake eraser, setting right their misjudgment of male genetic value – perhaps faked male superiority by using “game” by men may even promotes abortions this way when the woman realizes she actually allowed insemination by an inferior man.
You are making the “not all women are like that” argument.
All women are like that.
Unicorns do not exist.
If unicorns existed, Feynman could have scored by being high status in the university, instead of having to do what I do.
If gold diggers or unicorns existed, Trump would not have had to set up and emcee the miss universe contest, and Bezos would get laid.
Tiger Woods does not get laid by being a famous athlete. He gets laid because people show up to watch him and those people stay out of his way.
If in the entire world there were three unicorns and three gold diggers, it would be obvious.
No gold diggers, no unicorns.
Every woman everywhere is like that.
“You are making the “not all women are like that†argument.”
Yes-
but with a nuance: I don’t say that there is a difference what sexually arouses women, smart ones or dumb ones;
I say there is a difference with what kind of men today’s women, given advances and knowledge about genetics, IQ etc., actually reproduce, have children with:
Smarter women more and more often choose consciously eugenically, not emotionally.
My brother works as a Dr. in reproductive medicine, and he sees an ever-growing number of smarter/richer/higher class women who ask for sperm from high-IQ, high life-success donors.
They sometimes pay so much for it, he jokes all those PhDs and high-IQ, verified top-healthy men would get richer from ejaculating in tubes than from a lifetime of work.
Higher class women, while they surely often have non-reproductive sexual fun with toyboys in their youth or later, also put great import on with which men they actually reproduce/marry – and it’s most uncommon (though it happens, often by the “black sheep” of the family) that they choose the sexually arousing Jeremy-Meeks-type toyboy instead of the rather less sexually appealing CEOs, doctors, accountants, and other such “boring” men.
And this is not exactly a new phenomenon;
“social assortative mating” happens since at least hundreds of years, at least in the upper middle and upper class.
There, boys and girls are allowed to have some harmless sexual fun with members of lower social classes, but actually reproducing/marrying them is unthinkable, taboo, met with disinheritance and worse.
Today it doesn’t count at all with whom you have sex with;
sex means almost nothing.
What is important with whom you reproduce, because genes are the basis of power.
I also read about the game-related model of “alpha fucks, beta bucks”.
Sure, the alpha has more sex; but it’s typically the beta’s DNA that makes it into women’s children, even in the middle class.
In that sense, the alpha sex gods are rather impotently sterile – their offspring-per-sexual-activity-ratio is very low; the beta may be more sexually frustrated, but it’s his children the women actually give birth to – and the betas now make sure, because more and more insist on paternity tests.
I am not sure of it because I know no actual numbers, but I wonder if “alphas” actually today have less reproductive success, because they can have sex so easily and often and with attractive younger women, that they postpone fatherhood longer, and end up having less offspring than they could have, less than perhaps even the average “beta”.
Blah blah wall of text.
You are bringing in another false and disproven premise, which is that women are inclined to abort rape babies. Most of them do not. Thus, rape is a successful reproductive strategy. It is an illegal strategy, yes, and there is a high chance that you personally will live out the rest of your days in a cell, so I really can’t recommend it as a strategy.
But rape is more likely to cause pregnancy than consensual sex, and women are very unlikely to abort pregnancies caused by rape, so the rapist’s genes will survive and thrive, even if the rapist himself does not.
You left out “shit test”. Look up postpartum depression and the infanticidal urges that come with it.
“You left out “shit testâ€. Look up postpartum depression and the infanticidal urges that come with it.”
As far as I know, these are no “shit tests”, but instinctive tests for social support of the new mother and her child – if the mother+baby are socially welcome, and being cared for, met with eager support, then postpartum depression will not lead to infanticide;
if that support is lacking, or the women is even met with hostility, infanticide may happen, passively or actively, to prevent malinvestment in the newborn, which is unlikely to survive in a hostile social environment anyhow.
>these are no tests
>but they are tests
low energy post.
I never said they are “no tests”.
I said they are no “shit tests”, but “social support tests”.
Which is something different, and has not necessarily to do with any man.
Nonsense.
A shit-test is when a woman gives you shit regarding something she claims is Very Important. But once the test is passed, she will have completely forgotten how Very Important that thing supposedly was, revealing it was a shit-test.
When a woman gives birth to her first child, she will give her man a nuclear shit-test, such as not caring for the child, refusing to breastfeed him and doubting aloud whether it was a good idea to have a kid.
But of course, once the test is passed, she will deeply love the child, breastfeed him and say it was the best idea ever to have a kid, revealing it was a shit-test all along.
You’re making a circular argument. “Social support” for females is dominant males. With husband, very low chance of infanticide; without husband, very high chance. Fathers can sometimes fulfill that role; mothers, sisters and “friends” generally cannot.
If women were comparing you to the most alpha man they know of, television, internet, etc included, no man would ever get laid except for rockstars and hollywood actors. Media does not have as much of an influence on the female libido as you think it does.
Every woman, without a single exception, who rides my motorcycle will have hot passionate sex with me immediately afterwards, because real danger and real helplessness are far more exciting to women than an alpha male on a TV screen thousands of miles away, in the same way that a picture of a porn star’s tits, no matter how hot, will never get me as hard as the touch of real willing flesh in person.
Men will choose porn over fat chicks, and women will choose romance novels over betas, but no man is going to pass up a fuckable woman for porn and no woman is going to pass up an alpha male for simulated alpha on a TV
“If women were comparing you to the most alpha man they know of, television, internet, etc included, no man would ever get laid except for rockstars and hollywood actors.
Media does not have as much of an influence on the female libido as you think it does.”
Yes, in the past, because most women never even got near to the media ideals of men, and they knew it.
Not so any longer, it seems:
Tinder allows, according to some data, the 20% or so top men to have sex with 80% of women – woman now have access to real superior men all the time, everywhere.
This tech has changed the environment, the incentives, the realistically attainable access to top men, at least for sex:
https://medium.com/@worstonlinedater/tinder-experiments-ii-guys-unless-you-are-really-hot-you-are-probably-better-off-not-wasting-your-2ddf370a6e9a
When stable human nature collides with a new environment, new behaviours and social dynamics can emerge.
And so? We shut down Tinder, Grindr and all of those other degeneracy factories. There is no universal law that says this technology must be allowed to exist. Far better businesses have been shut down, based on far flimsier justifications.
Hey, boiler-room bosses, if you’re listening: could we please have CR and Kookanic back? At least they’re interesting. These garden-variety shitlibs are boring.
No they weren’t.
Koanic’s insane tangents were interesting.
I miss shaman, he must be on vacation, otherwise he would have nuked these entryists three times over. I must admit the comment section has been a little dry lately without his presence. He also drove away most of the interesting kooks so it’s just the regulars dunking on ERTZ.
https://bit.ly/2GLUA7V
“We shut down Tinder, Grindr and all of those other degeneracy factories.”
OK, I would welcome that;
but how exactly could you do that?
These services are wildly popular,
and officially they are only the online version of dating agencies,
which exist for centuries.
I just cannot understand why you think you have the power to actually do such things.
Do you understand the concept of linear time? You know – past, present, future?
Tinder didn’t change the nature of the game at all, it’s just made sluts more slutty. I’m not in the top 5% of looks or demonstrable status you need to pull on Tinder, so never had much success with it, but then I’d go outside and get laid because theoretical access to an alpha means nothing compared to actual presence of one.
Tinder didn’t stop women going to bars and parties, doesn’t stop them from wandering around in hot little outfits looking for some cock, because zoology wins in the end. Stop blackpilling. It’s totally possible to impose male power on women. Phallus Invictus.
When cops kick down a man’s door to force him to fail a shit test, it is not changes in technology or economics that make his marriage unstable.
Raping women leads to reproductive success today.
Women head off into situations where they are likely to get raped as if sleep walking or hypnotized, then fail to complain about the consequences, and fail to abort the consequences.
One of the really awful second-wave feminists, maybe Andrea Dworkin, really laid this bare with her advocacy of culling the male population down to 10 or 20%. In a typical coed group, no matter how high-status the men are relative to the outgroup, women perceive about 80% of them to be betas and want them to just go away, to literally go off and die in a hole somewhere.
However, women behave differently when the actual sex ratio is strongly skewed in favor of women. If you have 80% women and 20% men, then the increased competition for the available men starts to balance out the hypergamous urge.
Admittedly, I haven’t been to a college football party, but I assume the sex ratio is similar to other college parties, just with better-looking women. You need to induce scarcity, which is part of what patriarchy does by preventing girls from meeting alphas who are way out of their league, marriage-wise.
[…] Jim on how to fix marriage. […]
It occurred to me that your ideas could be called sexual communism:
You are sexual communists, because you want a state-enforced resource distribution – women – and will not allow competition and free enterprise and difference in outcome (some guys “richer”=having more sex/more women).
I have the suspicion you actually do this out of a fear of your own sexual failure, your civilization-enhancement only being a conscious or unconscious pretext.
You say that women should be basically property without rights;
OK, this may work in the West, too, evidently does in the East/Islam.
You say that then, when every guy is locked to one woman, adultery punishable by death, many social ills will end, and most guys starting to work hard to feed their wife and family, and then utopia-paradise will break out.
I find this a bit naive, it’s like a “right to work” = “a right to a woman” – just as communistic: Differences in outcome, the fundamental driver of envy, hatred and many social dysfunctions will not end, because jobs, as well as women, differ greatly in desirability.
Those guys who got only the ugly women will still envy-hate those men that got more beautiful ones, will envy-hate be openly or secretly aggressive toward those better-off men, or/and will become frustrated and sink in depression, alcoholism, obesity, etc. just as they do now.
I wonder if your intention to keep up social differences in income/wealth/social status, but not in the distribution of women, is motivated by you feeling that you can do well enough financially for yourself, but have insecurities regarding your sexual success.
“One woman per man, everybody is sexually equal” sounds a lot like sexual class warfare to me.
Except in our current situation it isn’t ‘some men get many/many get none’. It is ‘no men get any’. Hugh Heifner- the poster boy for hedonist playboy had 4 children. He had less children than every single normal Amish of ultra-Orthodox Jew.
Now, you can transition from free love to polygamy, but polygamy breaks down because it sets son against father (since the father has higher inclusive fitness impregnating additional brides instead of giving one to his son) as well as every man against each other. With certain limits, you get China. Without them you turn society into a copy of arabs- clannish, incapable of cooperating or producing anything of value and a blight on their neighbors who only exist because no one is bothered enough to go through the trouble of exterminating them yet.
That’s literally the opposite of what we want, and demonstrates the perennial academic leftist inability to actually see/hear the words we say, instead hallucinating some other argument in their place.
We want the state to butt out of male-female relations. Government should practice strict non-interference when a man needs to discipline a woman. The only legal precepts that need to be enforced are (a) in conflicts between father and husband, husband comes first; and (b) marriage means sex and sex means marriage.
You are accusing us of preference politics, of which you and all other leftists are constantly guilty. It is projection. PUAs advocate for patriarchal monogamy against their own sexual interests, but in the public interest.
” The only legal precepts that need to be enforced are (a) in conflicts between father and husband, husband comes first; and (b) marriage means sex and sex means marriage.”
How do you handle the conflict between to or more applicants for one woman?
How do you handle the fact that the most attractive women are in highest demand?
If sex=marriage then then men would all attempt to just be the first to rape the most attractive women, wouldn’t they?
What about divorce?
What about the fact that the more powerful men in society won’t ever accept that they should limit themselves at one single women?
And – if people would actually hate your enforced sexual communism and just flee the country that you had in some way brought under your control – would you shoot them at the border when they attempt to flee?
And, if you notice you run out of population, would you also see the need for sexual Trotskyism, a need for world sexual revolution, a need for international sexual communism, because your system can not work in only one country, but must be enforced on all of humanity, a sexual Comintern?
“How do you handle the conflict between to or more applicants for one woman?”
The same way you handle multiple people attempting to buy any other product- the owner gets to decide. In this case the father.
“How do you handle the conflict between to or more applicants for one woman?”
“If sex=marriage then then men would all attempt to just be the first to rape the most attractive women, wouldn’t they?”
We support shooting thieves. This is the same thing.
“What about divorce?”
Same as in the past- no divorce except for breach of contract.
“What about the fact that the more powerful men in society won’t ever accept that they should limit themselves at one single women?”
Then they can murder foreigners and fuck their women.
“And – if people would actually hate your enforced sexual communism and just flee the country that you had in some way brought under your control – would you shoot them at the border when they attempt to flee?”
Why would we? Men leaving makes the sex ratio better for everyone else. Women don’t leave- they belong to their fathers or husbands.
He has a point about the alphas and the one woman thing…
This is why I say don’t make adultery too severe a penalty (horsewhippings) and do absolutely nothing to discourage brothels.
Adultery needs to be punished fairly severely. It destroys the trust that men need to cooperate. It can be handled organically by simply refusing to punish a man who kills an adulterer. The king should not enquire too closely to the disposition of bastards or adulterers.
I don’t moralfag on many things but the bastardcide thing is too horrible for me to endorse…
I still don’t understand your arbitrary insistence against bastardcide. There is little moral difference between abortion and bastardcide. You are pro abortion, yes? So why not bastardcide?
Pro early abortion at discretion of husband or father. Don’t agree with the JP II meme that 1st trimester abortions are the same as a baby. Also If severe defects are detected.
Sixteen weeks, which is just a bit past first trimester, is obviously the same as baby.
And abortion at four months?
We want to reproductive strategies that take possession of the woman and her children to succeed, and reproductive strategies of abandonment to fail.
This incentivises cooperation. If bastards survive, incentivises defection.
A case of one man’s modus ponens being another man’s modus tollens.
Its also unnecessary. Social pressure will do most of the work, as will whippings for rebellious sluts, no welfare or affirmative action of any kind, and any institution even indirectly encouraging sluttery will have its doors kicked in and the building burnt to the ground.
Bastards will be given a back door to enter society if they are willing to fight for it.
The combination of social pressure, removal of any social support institutions, and corporal punishment should be more than enough.
Cutoff must be somewhere, 1st trimester is good. Maybe later in cases of severe birth defects being detected.
As we’ve discussed we will have very few bastards since women will be married off young and the few who aren’t subject to marriage by abduction and mandated to birth control or sterilization, I don’t think it will ruin much to avoid horrific and cruel Duplessis orphanage situations for the few bastards who slip through (which will about 1-2% of the rate now) the cracks. Showing some compassion for the few is not going to destroy the system and hell not all of them will necessarily be genetic wastes… and the kingdom will have some use for men with no family ties… Female bastards won’t cause any problems as long as they are married off like other women its men who really need fathers. I’ve always got on generally better with fatherless girls (I’m not naturally a dark triad type at all… and you’ve noted yourself that fatherless girls show less preference for dark triad types then normal women).
My horrific cruelty is reserved for leftists and eventually for (at least Sunni) Muslims… all of which (at least people with stubborn belief) should be subject to “The Final Helicopter Ride”. The progressive era came about because the ideas of progressives were not violently suppressed, the state religion needs some kind of saying that “thou shalt not suffer a progressive to live”. The agenda of progressives and commies is invasion, mass theft and mass murder and at some level they are aware of it (witness the glee which a drunk progressive will talk about mass immigration overrunning flyover country) as such they are not innocent and mercy is a mistake, same with at least Sunni Muslims.
So called left-libertarians and hippie/new ager types are less fanatical and less evil… should be given a far greater chance to repent and conform.
Deuteronomy 7:1-5
Against my better judgment, I’ll answer the same questions that Jim has answered a thousand times already:
In patriarchies, this rarely happens because women aren’t high-status. When it does happen, particularly among the elite and usually for reasons not related to physical appearance, the father decides, as SS explained.
There’s nothing to “handle”. The father chooses an appropriate husband, and if he fails to do so before the girl becomes sexually active, then she gets shotgun-married.
They need to have physical access to those women, first. This is why the women, not the men, must be kept on tight leashes.
Abolished.
No man rules alone, and hoarding all of the women for yourself is a great way to get yourself killed by subordinates.
STFU shill.
GTFO shill.
FOAD shill.
You seem mighty angry and aggressive.
This is often a sign of strong frustration from enduring low social status in men,
because it activates an instinctive program to take what one wants (riches, status, women) by force, because even a low chance of getting it from violent acts is better than certain evolutionary failure.
Are you sure you are alright?
I also wonder if you guys have some kind of unhealthy power fantasies;
you expect to be able to restructure the foundations of our societies and legal systems, moral and cultural customs.
And I think you perhaps put too much confidence in guns (if you are Americans) – guns do not automatically mean being able to control things, they are only petty power, not much like a stick or knife. If this were different, the more guns people had, the more powerful they would be; but obviously it’s not the gun hoarders or the military generals that live in the mansions on the hill – do you think you understand why this is the case? Why weak-bodied older men live there, at most protected from some low-grade-armed bodyguards?
I also KNOW that there are tools and methods that are more powerful than guns (I invented, built, own and used and use some of them myself, so I know what I am speaking about), especially for controlling societies, for bending people and peoples to one’s will. And I am almost completely certain you can’t even dream about those, because you do not know what you do not know, and therefore greatly underestimate the capabilities of your opposition (which, by the way, I do not include myself in, despite your aggressive attitude and false belief I would be your enemy).
Psychoanalyzing one’s critics – another trait of leftist/Marxist academics.
You’ve now made it painfully obvious that this metaphor didn’t just suddenly “occur” to you. You initially represent yourself as an intellectually-curious person who stumbled upon this post and wants to hash a few things out, but that quickly devolves into the usual dishonest tactics of motte-and-bailey, implied false premises, changing the subject, appeal to fear/popularity, and repeatedly hammering the same points over and over again even after others have told you they’re wrong and explained to you how and why they are wrong, amidst many others.
People in search of answers do not post repetitious and hyperbolic walls of text, refuse to acknowledge prior responses, and repeatedly change the subject in order to disorient the audience before restating the same points (“you have no power” / “you’re actually communists”). Of course you’re the opposition, despite the fake “how do you do fellow reactionaries” act.
ERTZ:
Social Justice warriors always project.
The only anger and aggression that I see comes from you, Ertz.
You are full of hatred and malice. You want to destroy, and you want to hurt.
No one here has been talking about guns, about armed revolution or terror directed against official victim groups. You are concocting rationales for killing us, which rationales drift towards being rationales for murdering all white heterosexual males in flyover country, all deplorables, all trump voters.
You respond not to what we have said, but to what we would have said had the left wing justifications for repression and terror been true, which delusion reveals your rage and your evil.
We have explained our plan to you – but crimestop prevents you from hearing or understanding our plan, and your evil and your malice invents in its place the left wing justification for repression.
Carlylean Restorationist would not hear what we said and kept reinventing us as Cultural Marxists. You will not hear what we say and are reinventing us as antifa imagine us.
>Social Justice warriors always project.
I am not one. “Justice” does not bother me that much, because in my opinion morals are only functions of instincts and interests, and fairness does not exist at all.
>The only anger and aggression that I see comes from you, Ertz.
Perhaps I am angered, but I think I am actually more confused about what you want and how you can come to think that you can achieve it.
Anger and aggression clearly are indicated by “STFU”, “GTFO”, “FOAD” – if you guys wish me to die, that is quite aggressive.
>You are full of hatred and malice. You want to destroy, and you want to hurt.
Perhaps.Not always, but I indeed have such sentiments sometimes.
I think that is quite healthy and normal.
BUT I want not at all to destroy or hurt you. This is something you have made up, and it’s wrong.
But I now wonder more and more if you guys are not just sane smart guys, which I felt because I read and appreciated many of your past articles and some comments, but more like fanatics.
>No one here has been talking about guns
I have no source, but I can remember that someone (you?) talked about how the military and Trump are on your side or something like that.
>about armed revolution
But what you desire is like a revolution – you would basically end human rights (women ARE humans),
turn around fundamentals of our current culture, laws and customs.
You would make half of the population – women – basically into slaves of men.
Now I think, too, that women are crazy, often evil, etc. – but I think that not only goes way too far, but also has quite about zero chances of being more than an impotent power fantasy.
Because you never have answered even remotely how you could get the power to force your idea on the rest of society.
>You are concocting rationales for killing us
You are so intelligent that you see clever, complex schemes were I neither intended nor even thought so far,
even if that had been my intentions, which they were not. Killing and extermination, GENERALLY, are inevitable, EVERYBODY must do it in natural and sexual selection, not just killing (which just ends a life), but EXTERMINATION, which kills/ends a whole genetic line. This is just how the world is.
> which rationales drift towards being rationales for murdering all white heterosexual males
I do not, I do also not have suicidal thoughts, because I am a member of this group.
> in flyover country, all deplorables
I am just a German guy who not even knew before googling what “flyover country” even is/means in US culture.
>, all trump voters.
I do not really like Trump, I think he is no genius, more like a confused opportunist with loads of troubles, his own,
and now the whole US’, to manage. BUT were I an American, I would have voted for him, not because I liked him much, but because I am so disgusted at the other side.
Actually I would have voted for a toaster rather than Hillary&Co.
>We have explained our plan to you – but crimestop prevents you from hearing or understanding our plan, and your evil
>and your malice invents in its place the left wing justification for repression.
I REALLY cannot grasp the whole thing you explained. I do not understand it.
I get it so far: You want to make women men’s slaves, etc.
I understand that. And, from a point of building a male-sexual-interests-centric society, that probably would have
higher fertility, and could be more war-like (in terms of being easily able to afford losing millions of men, like Hitler tried
in his fertility politics, “Mutterkreuz” and all that).
I even understand that it MIGHT have eugenic effects, because if fathers select his daughters’ husbands, that may end up being better than allowing the female propensity to choose according their instincts.
But HOW can you think that system can ever arrive?
I already wrote above who I think your opponents will be:
Women, the top 1% of men (who want more women for themselves), leftists, and all men who join the women’s side in hopes of scoring sexual rewards for pleasing/serving women (“White Knights”).
If I did not miscalculate, you are a tiny, extremist minority, that wants to turn society on its head.
>You will not hear what we say and are reinventing us as antifa imagine us.
I hear you, I am not antifa, and I indeed do not really understand HOW you want to realistically achieve what you want (WHAT you want, and mostly WHY, I think I have understood so far).
Puh-leeze. What is this, microaggressions class?
You keep asking us how X will come to be, or claiming X requires Y, and when we explain that X actually only requires Z, you change the subject, write another wall of text, and then pretend we never talked about Z and return to your claims of X and Y.
You ask how patriarchy will be enforced and claim that it requires “power”, but really meaning violent revolution. We answer that patriarchy only requires the civilizational collapse or near-collapse of non-patriarchy, at which point patriarchy will eventually fill the power vacuum and create long-term stability. You then ignore discussions about collapse and power vacuums, make oblique references about communism, psychoanalyze the people who reject the analogy, and finally return to loudly re-asking the question of how patriarchy can ever come to exist.
While most of antiquity has been patriarchal, there have been many attempts at female emancipation, all eventually ending in societal collapse and eventual return to patriarchal rule. You can rest assured that during those deviations from patriarchy, there were many men and women making the same claims you are, that the cat is out of the bag, the genie is out of the bottle, women will never accept “slavery” (erroneous term), that millions of innocents would die, and so on. They were wrong, and you are wrong.
Crimestop is causing your confusion. We have been entirely clear.
Would that be the fundamentals of 2018 culture, laws and customs, or the fundamentals of 2019 culture, laws and customs?
We have seen one hell of a lot radical and violently unpopular social change in a very short time. People want families, they want children, and they can no longer have them, are no longer allowed to have them.
The bottom line is that we want to restore marriage, change that will be immensely popular with the vast majority of men and women.
Download webnovel on your phone. Tell it you are a girl looking for romance stories. Select comics. Every single comic has some powerful violent man taking possession of the female protagonist.
Random sample: “Flaming hot desire”: Girl is slutty, drunk, and badly behaved, shit tests a random male, who turns out to be a powerful crime boss. Crime boss commands his minions to haul her off to his room to be raped. Minions deliver girl, who makes no attempt to leave. Rapes her, turning her into a chaste and well behaved woman.
All the comics are like that. Male commands, sometimes male compels. Female submits, female is entirely in the male’s power. This is what women want.
Chicks are telling us that emancipation was just a shit test. They don’t like it, they don’t want it. They were, and are, just kidding, and as soon as we call them on it, they will all settle down and we will all have a good laugh.
What we propose is the fantasy that chicks are dreaming of, is the private family social order of the early 1960s, backed by the law and political institutions of the 1660s, as the crime boss in that comic was backed by his crime organization.
Non patriarchal social orders always collapse after a short period. The only matter in doubt is whether we will survive the collapse, or be replaced by conservative middle eastern Muslims.
Men will not defend a matrilineal system, and it produces few children to defend it, so perishes in conquest and slavery, or collapse, or some mixture of the two.
We’ve been over this many times.
“As the supreme alpha male of the land, the sovereign trades some of his authority over women to the common man to ensure that he can enforce chastity in his daughters and obedience in his wife. In return, the common man gives his sovereign loyalty in war and obedience in peace.
This is not redistribution by command, this is a mutually beneficial trade of things which properly belong to each party and are more valuable when traded. The King could bang every woman in his territory, but then he would be king over a henhouse of bickering bitches and disloyal cucks. His supreme alphaness is more valuable when traded for loyalty. A common man could live far from society and use his violence only for himself, give his obedience only to himself, but then he is fighting a constant war against nature and other men. So his violence and his obedience are more valuable when traded for security, peace, and marriage
The command economy of marriage has never existed and would probably be as disastrous as socialism of goods”
>The responses to this comment
That means that this was just joking around, right? https://blog.reaction.la/war/the-faith/#comment-2109335
The sexual communism argument was already made. PUAs, while the manosphere was still operative, called it pussy socialism and railed against it. Now they are converting, getting married, and making our points because we have better memes and our ideas are better. You will want to try another vector of attack. I suggest that you request a new set of scripts from your superiors.
Interesting thought, though. Maybe he actually is an autistic tech nerd libertarian. We used to get a lot of libertarians before they well full retard social justice or hard right. Is he an ideological survivor of libertarianism that hasn’t got the joke yet?
It’s possible, but his writing strongly suggests academic leftist. The use of numbers as headings, odd phrases such as “Above I argue that…”, poorly-structured walls of text, recycling long-dead arguments and throwing everything against the wall to see what sticks, constant NAWALT hammering, literal inversion of facts (e.g. rape abortion), and the frequent use of hidden assumptions.
Hard to tell progressives and left-libertarians apart sometimes, though, since the ideological gap between them is not significant; they’re like two tiny adjacent branches way at the top of a very tall tree.
It is interesting that these days academics are generally poor writers. A century ago, academics were selected in substantial part on ability to write well.
It is also very noticeable that while older academics are always reasonably smart, and sometimes very smart indeed, younger academics tend to be as thick as two planks glued together.
This is reminiscent of the Great Minority Mortgage Meltdown. Affirmative action was yielding embarrassing results, as almost every white male rejected had a better credit score than almost every minority accepted. So they adjusted their mortgage worthiness criteria to be less racist, which had the effect of issuing mortgages to the worst hispanics, instead of the least bad. I remember a time when every MIT software engineering applicant was absolutely brilliant, but these days there is no guarantee that they can code at all.
How does the mutual sexual obligation thing work, as far as the husband’s obligation to fuck the wife is concerned? Is this an X-times-per-month obligation, with particular times to be decided upon by the husband on a “Yeah, I’m in the mood now” basis? Because it’s a fact that once a man’s familiar with a woman there are often other things he’d much rather do — and he’s the one who’s doing all the fuck-work, so the burden’s heavily on him.
What if she wants to be fucked in the evenings but he’s a “morning person”? Does he fulfill his obligation — after two years of marriage, let’s say — by fucking her three times per two week period in the morning when she’d rather be fucked three times per one week period in the evenings?
Also, does his obligation involve an obligation to make her come? It seems to me that if he didn’t have to worry about that he’d be inclined to fuck her more frequently. (And of course not having to roll a condom over his cock is going to remove a big impediment to frequent fucking.)
Does her getting fat diminish his obligation? What if she’s become disgusting and he just can’t get it up for her? What if even though she’s not fat she’s reached the age of 50 and her neck-skin is visibly sagging?
Another, more theoretical point — it seems to me that talk of mutual sexual obligation is going to distort people’s view of sexual reality all over again, for in fact mutual obligations can obtain only among and between men, who are capable of promise-keeping. If an entity can’t keep promises (and therefore can’t in any meaningful sense make them), it has no obligations. Women are as incapable of keeping promises as dogs are, and are therefore equally amoral and devoid of obligations. Being incapable of keeping promises, women are also incapable of making promises. Women can speak, and are therefore capable of pretending to make promises, but this is only pretense.
(For women, speech is a manipulative technique rather than an attempt to see reality. Of course, promise-making is also a practical rather than theoretical linguistic action, so I’m not sure why the entirely non-theoretical character of female speech precludes genuine promise-making, but there does seem to be a link here that I think I might be able to discern if I thought about it some more.)
Regarding the link between the unintellectuality and the amorality of women: their inability to perceive the Higher Unity of Being prevents them from deliberately ascending into that Unity via promise-making (which bind the souls of promisers). Promise-making presupposes this perception of Higher Unity.
Men want to come, and we are very disappointed if we do not. Women really don’t care all that much. What a woman actually wants is that some man she perceives as alpha ejaculates inside her from time to time. And she actually prefers it if we do it whenever we feel like it, regardless of when she feels like it.
Her orgasm does not matter, only his.
It is not an obligation from an equal to an equal. It is from an authority to a subject, just as the king owes it to his subjects to keep the peace among them by enforcing the law. This does not undermine the king’s authority.
Warning, some spoilers.
Interesting possible example of “demon lover syndrome” on Twitter. Cassandra Fairbanks went to go see “Once Upon a Time in Hollywood” and not only did she dislike the movie, she was *outraged* by it! I kid you not. Apparently she’s “extensively studied” (with original research (letters, interviews, etc.)) the Manson murder(er)s.
The movie involves a fictional, fantasy “alternate history” rewrite of the incident with a “happy ending”. The Manson killers are treated as low class, and her “demon lover” Tex Watson, is mauled to death by Brad Pitt’s pit bull. In reality he was sentenced to death and is currently still alive serving life in prison.
Her emotional reaction to the movie is interesting. I wonder if she is even self aware? Here’s the beginning thread.
https://twitter.com/CassandraRules/status/1158600748516724737
[…] seems well to quote here Jim on modern marriages. Now Jim tends to exaggerate the Bernie Sanders interpretation of women’s desires […]
This nonsense again. Paul advises against marriage, Christ never says “be fruitful and multiply”, Peter leaves his wife. Of course, given that most will end up eternally damned. Life is shit, at least when you’re mentally ill. Sterilize mentally ill people at least, to spare us this utter useless existence we never asked for. Because some imbecile ejaculated into a woman’s vagina! Sex is a curse that won’t exist in heaven. No wonder those with the deepest faith live celibate lives, like Kierkegaard, not to speak of the monastery. Even Vox Day agrees, for he wrote “The Bible teaches it is best not to marry” (because most will be damned forever) and also agrees with eugenics: Darkstream “Life is more than suffering” around 33:05 (I disagree, life is only suffering with mental illness, at least he agrees they should not reproduce).
Jeremiah 20:14-18 and Philippians 1:21-23 hit thr nail on the head.
Nuts.
Saint Peter was martyred with his wife. Therefore he did not leave his wife. Saint Paul tells men to marry their daughters off in reasonable time.
Saint Peter’s mother in law lived in Peter’s house and was cared for by her daughter, his wife, therefore his wife lived in his house during the ministry of Jesus. That she was martyred with him shows that she assisted him during his ministry.
Eusebius quotes Clement of Alexandria:
Clement of Alexandria was a Christian theologian and philosopher who taught at the Catechetical School of Alexandria. He lived about 150 to 215 AD so should know.
Now you might well claim that Clement of Alexandria was making stuff up, but Eusebius had access to a great big library of the early writings of the Christians, most of which is now lost, though the writings of Clement of Alexandria survive, and when Eusebius encountered a contradiction, he would say that one man said one thing, and another man said another thing, and attempt to reconcile their stories.
From which we may conclude that no one during the first few centuries of the Church contradicted what Clement of Alexandria claimed.
The people arguing for priestly celibacy will say “Oh it is just Clement of Alexandria that says the apostles married and had children”. Yes, it is just Clement of Alexandria, plus a few passing references in the New Testament that can be text tortured to say something different from what they are plainly saying, but Clement of Alexandria said it and no one during the first few centuries of the Church contradicted him. Everyone during the early history of the Church treats Clement as authoritative, Eusebius treats Clement as authoritative, and everyone in the next few centuries treats Eusebius as authoritative.
So I have Clement saying that Peter stuck with his wife and a long early Christian tradition that treats Clement as authoritative. What have you got?